
PeerJ are proud to announce the completion of “Advances in Computational Learning for Robotics“, a Conference Collection published by PeerJ Computer Science in association with the the 8th International Conference on Robot Intelligence Technology and Applications (RiTA 2020).
*****
Advances in Computational Learning for Robotics is available to download here
*****
This Conference Collection is concerned with an important area that has recently attracted the attention of both Robotics and Artificial Intelligence researchers: developing intelligent robotic systems that are capable of making decisions and acting autonomously in real and unpredictable environments, to accomplish tasks and assist humans across various domains within society.
We developed this special issue around the theme of Computational Learning to highlight the critical importance of this topic for ongoing progress in robotics and artificial intelligence.
This Conference Collection is formed of twelve published articles that have examined this issue from various perspectives:
- Transfer learning pipelines for skateboarding skills
- A novel interactive system for service humanoid robots
- Musculoskeletal modelling and humanoid control
- An algorithm for training AI soccer robots
- A visual-attention-based rapid and efficient lightweight CNN for object sorting
- An improved Kalman filter for quadrotor localization
- A precise localization method for wireless power transfer to electric vehicles
- Active triggering control of pneumatic rehabilitation gloves
- An improved transfer learning method for diagnosing hearing loss
- Dynamic modelling to improve the movements of quadruped robot
- A study into the impact of aesthetics on trusting robots
- A human-like walking control framework for a child-sized robot
We hope the robotics and artificial intelligence communities will find this Conference Collection to be an informative and useful collection of articles.
We would like to thank the PeerJ Computer Science editorial board and a long list of anonymous reviewers for their thoughtful suggestions and constructive criticisms. The contributions of the individual articles and of the Conference Collection in its entirety are stronger thanks to their hard work.
Collection Editors: Pengcheng Liu(a), Hyun Myung(b), Yu Dong(c), Guibin Bian(d), Junwen Zhong(e), Esyin Chew(f)
(a) Department of Computer Science, University of York, UK; (b) Korea Advanced Institute of Science and Technology (KAIST), South Korea; (c) School of Civil and Mechanical Engineering, Curtin University, Australia; (d) Institute of Automation, Chinese Academy of Sciences, China; (e) Faculty of Science and Technology, University of Macao, China; (f) EUREKA Robotics Lab, Cardiff Metropolitan University, UK
*****
In addition to those articles that formed the Launch Edition of the Advances in Computational Learning for Robotics Conference Collection, a further four manuscripts have been included in the completed collection.
Whole-body kinematic and dynamic modeling for quadruped robot under different gaits and mechanism topologies
Wei Yan, Yang Pan, Junjie Che, Jiexian Yu, Zhuchen Han

10.7717/peerj-cs.821/fig-1
Dynamic locomotion plays a crucial role for legged robots to fulfil tasks in unstructured environments. This paper from Yan et al. proposes whole-body kinematic and dynamic modelling methods based on screw theory for a quadruped robot using different gaits and mechanism topologies.
Models of three different mechanism topologies are formulated: (1) Standing phase: a system consisting of one end-effector, the body, and four limbs, the legs; (2) Walking phase: a system consisting of one or two lifting legs (depending on the chosen gait), two or three supporting legs; (3) Floating phase: a system in which all legs detach from the ground. Control strategies based on their models are also introduced, which include walk and trot gait plans. In the control system, two additional types of information are provided: (1) contacting forces are given by force sensors installed under feet; (2) body poses are determined by an inertial measurement unit (IMU). Combined with the sensor data and calibrated mass, inertia, and friction, the joint torque can be estimated accurately in simulation and experiment.
Their prototype, the “XiLing” robot, is built to verify the methods proposed in this paper, and the results show that the models can be solved quickly leading to steady locomotion.

10.7717/peerj-cs.821/fig-12
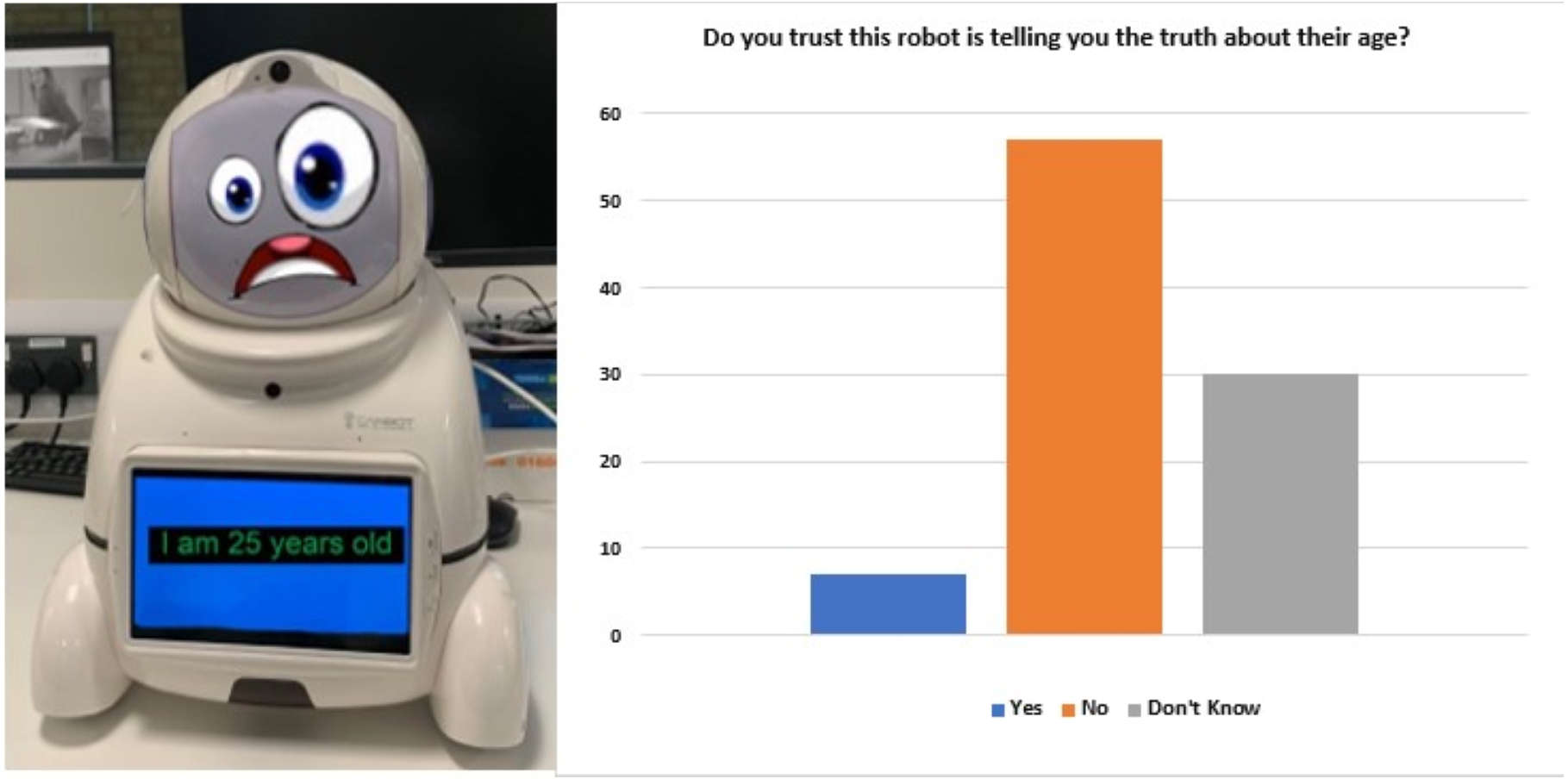
Human-robot interaction: the impact of robotic aesthetics on anticipated human trust
Joel Pinney, Fiona Carroll, Paul Newbury

10.7717/peerjcs.837/fig-1
Trust is expressed as a person’s ability to accept the potential risks associated with participating alongside an entity such as a robot. This paper – based on research presented by lead author Joel Pinney during his PeerJ Award Winning 3-Minute Thesis talk at RiTA 2020 – examines the influences of aesthetic design techniques on the human ability to trust robots.
Through conducting an online questionnaire distributed globally, the authors explored participants ability and acceptance in trusting the Canbot U03 robot. Participants were presented with a range of visual questions which manipulated the robot’s facial screen and asked whether or not they would trust the robot. A selection of questions aimed at putting participants in situations where they were required to establish whether or not to trust a robot’s responses based solely on the visual appearance.
The results showed that certain facial aesthetics seem to be more trustworthy than others, such as a cartoon face versus a human face, and that certain visual variables (i.e., blur) afforded uncertainty more than others. Consequentially, this paper reports that participant’s uncertainties of the visualisations greatly influenced their willingness to accept and trust the robot.
10.7717/peerjcs.837/fig-8
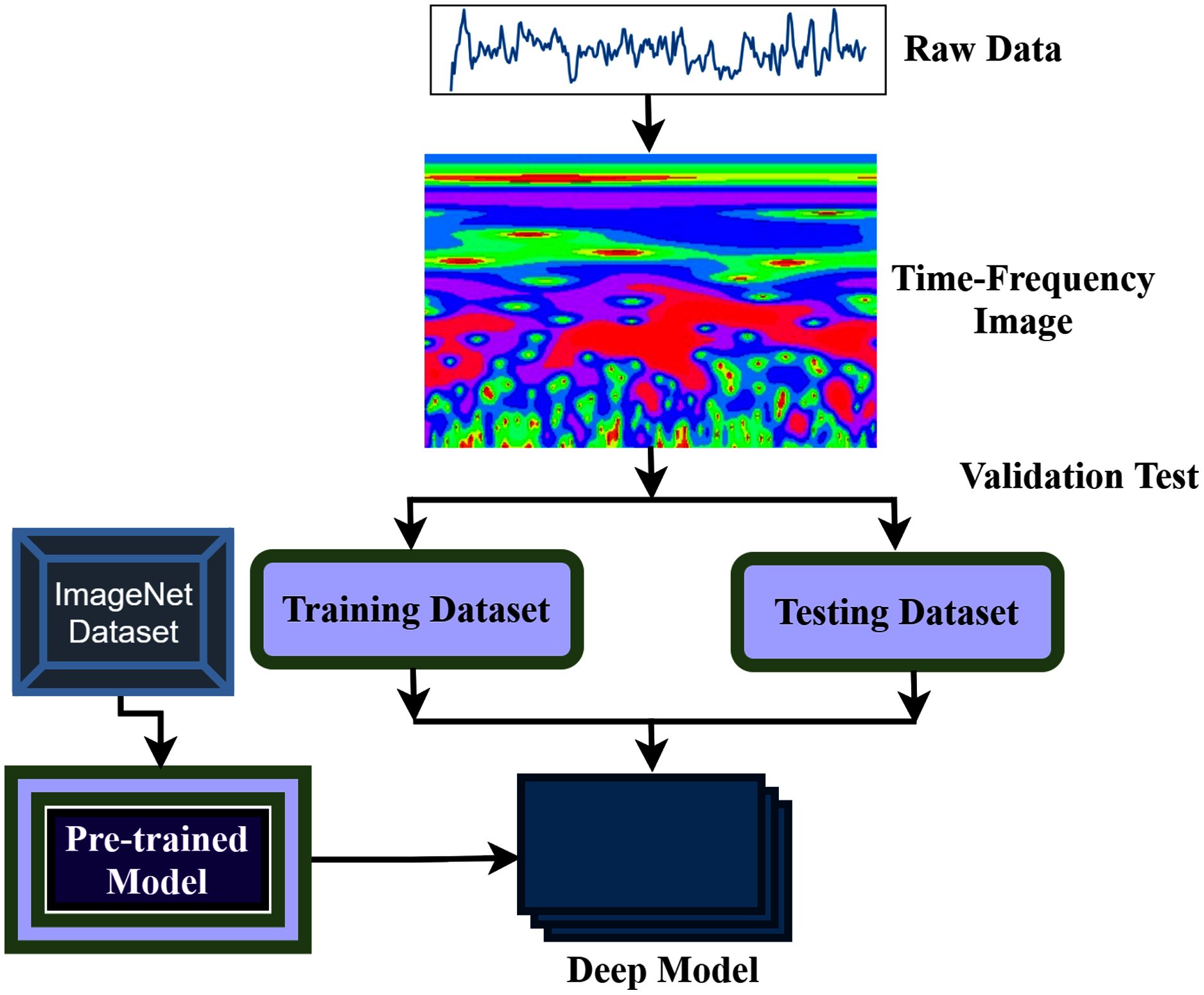
Diagnosis of hearing deficiency using EEG based AEP signals: CWT and improved-VGG16 pipeline
Md Nahidul Islam, Norizam Sulaiman, Fahmid Al Farid, Jia Uddin, Salem A. Alyami, Mamunur Rashid, Anwar P.P. Abdul Majeed, Mohammad Ali Moni
10.7717/peerj-cs.638/fig-1
Hearing deficiency is the world’s most common sensation of impairment, and impedes human communication and learning. The optimum strategy to diagnose hearing loss uses electroencephalograms (EEGs). Among a wide range of EEG control signals, the most relevant modality for hearing loss diagnosis is auditory evoked potential (AEP), which is produced in the brain’s cortex area through an auditory stimulus. This study from Islam and colleagues aims to develop a robust intelligent auditory sensation system utilizing a pre-train deep learning framework by analyzing and evaluating the functional reliability of the hearing based on the AEP response.
Their proposed method’s performance is validated using a reputed publicly available AEP dataset recorded from sixteen subjects who heard specific auditory stimuli in the left or right ear. The new method outperforms current best-in-class methods by improving the classification accuracy from 57% to 97%.
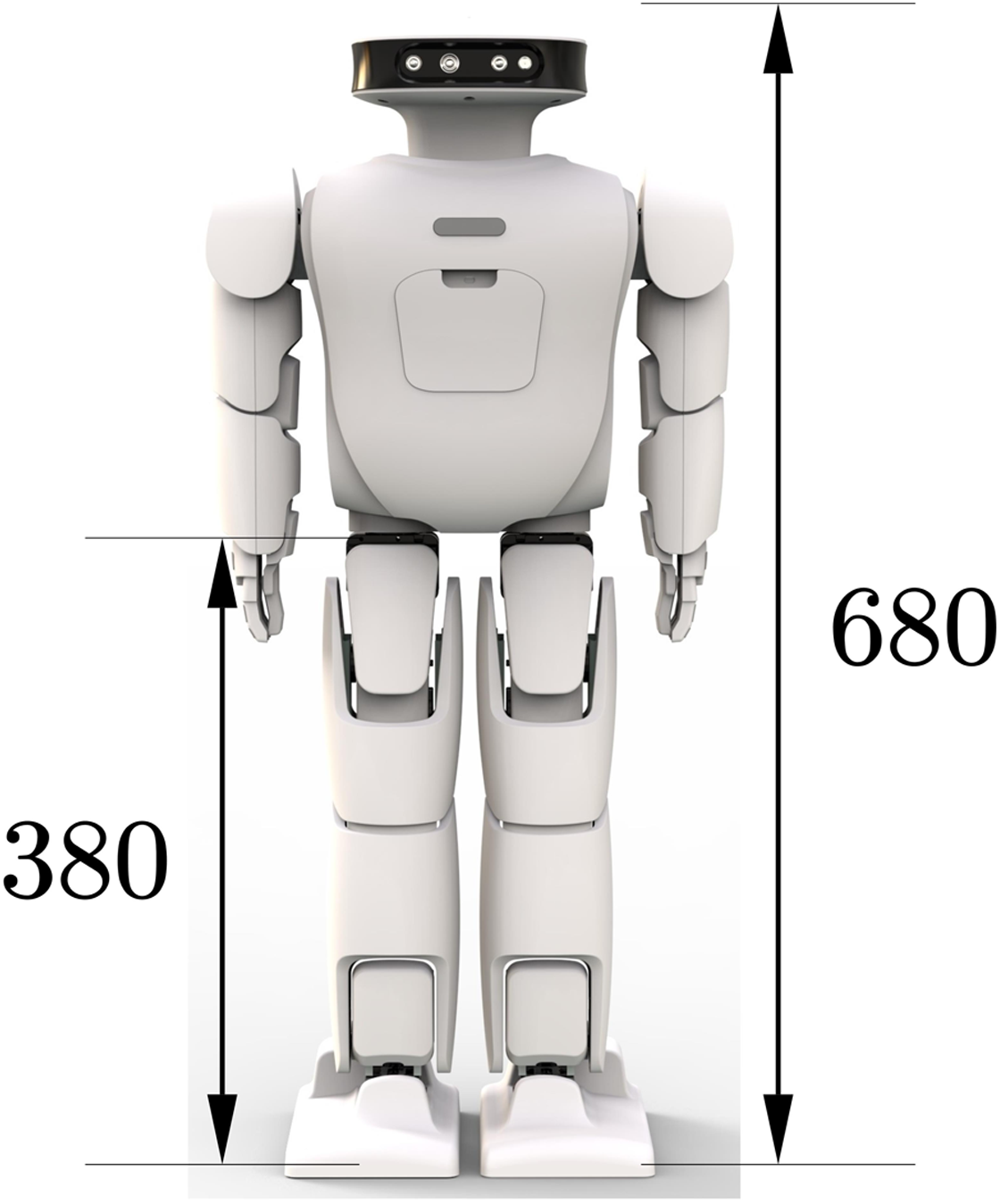
Kid-size robot humanoid walking with heel-contact and toe-off motion
Yucong Wu, Yang Pan, Xiaokun Leng, Zhicheng He
10.7717/peerj-cs.797/fig-1
Human-like walking features – such as “toe-off, heel-strike” – can enhance the performance of bipedal robots. However, few studies have considered the anthropomorphism of walking planning. Fewer studies still have achieved their toe-off, heel-strike gait planning framework in a child-sized humanoid robot platform.
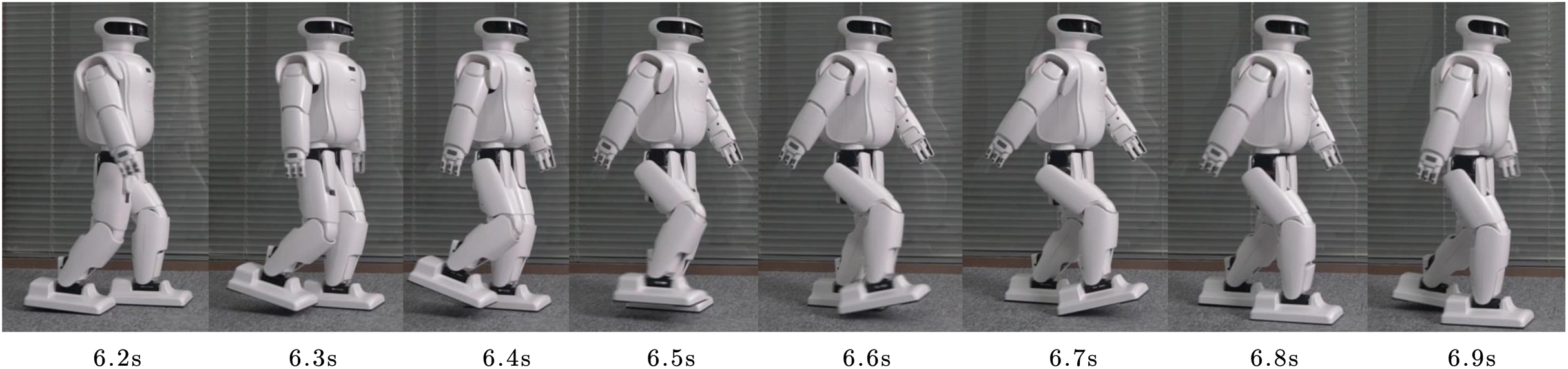
This paper from Wu et al. presents a human-like walking control framework based on the Divergent Component of Motion (DCM) com planning method that enables a child-sized humanoid robot to walk with a humanoid pattern with a speed of 0.6 s per step a strike of 30 cm.
The control framework consists of three parts: the human-like gait generation of the center of mass (CoM) and swings foot trajectory, the dynamic replan in phase switch and the upper body stabilization controller. The dynamic replanning of the CoM and foot trajectory can efficiently decrease the vibration in the step-phase switch. The upper-body stabilization controller can reduce the upper-body swing in walking and increase the robot’s stability. Software simulations and walking experiments are used to verify the motion control algorithm, confirming the effectiveness of the pattern generation and controller.
10.7717/peerj-cs.797/fig-18