
A novel chaotic transient search optimization algorithm for global optimization, real-world engineering problems and feature selection
- Published
- Accepted
- Received
- Academic Editor
- Željko Stević
- Subject Areas
- Algorithms and Analysis of Algorithms, Artificial Intelligence, Data Mining and Machine Learning, Optimization Theory and Computation
- Keywords
- Chaotic transient search optimization algorithm, Chaotic maps, Benchmark functions, Real-world engineering problems, Feature selection
- Copyright
- © 2023 Altay and Varol Altay
- Licence
- This is an open access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, reproduction and adaptation in any medium and for any purpose provided that it is properly attributed. For attribution, the original author(s), title, publication source (PeerJ Computer Science) and either DOI or URL of the article must be cited.
- Cite this article
- 2023. A novel chaotic transient search optimization algorithm for global optimization, real-world engineering problems and feature selection. PeerJ Computer Science 9:e1526 https://doi.org/10.7717/peerj-cs.1526
Abstract
Metaheuristic optimization algorithms manage the search process to explore search domains efficiently and are used efficiently in large-scale, complex problems. Transient Search Algorithm (TSO) is a recently proposed physics-based metaheuristic method inspired by the transient behavior of switched electrical circuits containing storage elements such as inductance and capacitance. TSO is still a new metaheuristic method; it tends to get stuck with local optimal solutions and offers solutions with low precision and a sluggish convergence rate. In order to improve the performance of metaheuristic methods, different approaches can be integrated and methods can be hybridized to achieve faster convergence with high accuracy by balancing the exploitation and exploration stages. Chaotic maps are effectively used to improve the performance of metaheuristic methods by escaping the local optimum and increasing the convergence rate. In this study, chaotic maps are included in the TSO search process to improve performance and accelerate global convergence. In order to prevent the slow convergence rate and the classical TSO algorithm from getting stuck in local solutions, 10 different chaotic maps that generate chaotic values instead of random values in TSO processes are proposed for the first time. Thus, ergodicity and non-repeatability are improved, and convergence speed and accuracy are increased. The performance of Chaotic Transient Search Algorithm (CTSO) in global optimization was investigated using the IEEE Congress on Evolutionary Computation (CEC)’17 benchmarking functions. Its performance in real-world engineering problems was investigated for speed reducer, tension compression spring, welded beam design, pressure vessel, and three-bar truss design problems. In addition, the performance of CTSO as a feature selection method was evaluated on 10 different University of California, Irvine (UCI) standard datasets. The results of the simulation showed that Gaussian and Sinusoidal maps in most of the comparison functions, Sinusoidal map in most of the real-world engineering problems, and finally the generally proposed CTSOs in feature selection outperform standard TSO and other competitive metaheuristic methods. Real application results demonstrate that the suggested approach is more effective than standard TSO.
Introduction
Optimization is the process of identifying the most optimal solution to a problem from among all possible alternatives. Given the nature of optimization algorithms, they can be broadly classified into two categories: deterministic algorithms and stochastic intelligent algorithms. Additionally, stochastic algorithms are categorized into two types: heuristic algorithms and metaheuristic algorithms (Yang et al., 2012).
Deterministic optimization algorithms are insufficient for large-scale combinatorial and nonlinear problems. Usually, due to the natural solution mechanisms of deterministic algorithms, the problem of interest is modeled in such a way that the algorithm handles it. The solution strategy of deterministic methods usually depends on the types of objectives and constraints and the types of variables used in modeling the problem. The efficacy of these methods is significantly influenced by the solution space, the quantity of decision variables, and the number of constraints involved in problem formulation. An additional noteworthy limitation is the absence of overarching solution approaches that can be implemented for problem formulations featuring diverse decision objectives, variables, and constraints. That is, most algorithms solve models with certain types of objective functions or constraints. However, optimization problems in many different fields such as management science, computing, and engineering simultaneously require different types of decision variables, objective functions, and constraints in their formulation. Therefore, metaheuristic optimization algorithms have been proposed. These have become very popular methods in recent years because they have good computational power and are easy to transform (Bianchi et al., 2009).
Recently, metaheuristic algorithms have gained unexpected popularity. This is because they have demonstrated their superiority in tackling several optimization challenges. General-purpose metaheuristic methods are examined in different categories: biology-based, chemistry-based, mathematics-based, music-based, physics-based, plant-based, swarm-based, social-based, sports-based, water-based, and hybrid-based (Altay & Alatas, 2020). The emergence of physics-based algorithms was caused by physics phenomena in nature. The most well-known include Big Bang-Big Crunch (Erol & Eksin, 2006), electromagnetism-like heuristic (Birbil & Fang, 2003), central force optimization algorithm (Formato, 2009), multi verse optimization (MVO) (Mirjalili, Mirjalili & Hatamlou, 2016), galaxy-based search algorithm (Hosseini, 2011), Henry gas solubility optimization (Hashim et al., 2019), gradient-based optimizer (Ahmadianfar, Bozorg-Haddad & Chu, 2020), equilibrium optimizer (Faramarzi et al., 2020), flow direction algorithm (Karami et al., 2021), Archimedes optimization algorithm (Hashim et al., 2021), transit search algorithm (Mirrashid & Naderpour, 2022), and transient search algorithm (TSO) (Qais, Hasanien & Alghuwainem, 2020).
Metaheuristic methods are being developed thanks to their simplicity, cheap computational cost, gradient-free mechanism, and flexibility, and the interest in the use of these methods is increasing day by day. In this area, there is a theorem called No Free Lunch (NFL), which proves that there is no general algorithm for solving all optimization problems and allows this work area to be used actively. It has been mathematically proven by the NFL theorem that there is no single optimization method that solves all optimization algorithms. Thus, while the optimization algorithm produces good results in solving one problem, it can produce bad results in another. The gap here also encourages researchers working in this field to produce new methods, improve existing methods, or hybridize methods by combining them. Another gap is that, due to the stochastic optimization process, it is very difficult to maintain a balance between exploration and exploitation in the creation of any metaheuristic algorithm. TSO is a very new physics-based method inspired by the transient behavior of switched electrical circuits containing storage elements such as inductance and capacitance. As with other metaheuristic methods, TSO faces the challenge of achieving the right balance between exploration and exploitation. This study focuses on finding a solution to this problem, improving the speed of convergence and the ability of TSO to find the global optimum solution, and ultimately improving the performance of TSO in terms of various metrics. To the best of our knowledge, no studies have been done on how to increase global convergence and performance rates while avoiding trapping TSOs in local solutions. For the first time, chaos theory has been applied to TSO in this work to eliminate the drawbacks of the method. In this work, chaotic maps are embedded inside TSO to create novel algorithms known as chaotic TSO algorithms.
In this study, 10 different chaotic maps were integrated into the TSO algorithm. The main motivation for the study is to use the number sequences obtained from different chaotic maps instead of the critical parameters produced by random numbers in the TSO algorithm. By using chaotic maps with ergodic, irregular, and stochastic features in chaotic map TSO, it is aimed at avoiding local solutions more easily compared to the TSO method. In this way, it is aimed to increase global convergence and obtain a better curve by improving the exploration and exploitation stages of the TSO algorithm. The proposed method has been applied to the accepted CEC’17 benchmark functions, real-world engineering design problems, and feature selection in the literature.
The remainder of the article is organized as follows: In the second section, the working principle of the TSO algorithm is given. In the third section, chaotic maps are examined, and their equations are given. In the fourth section, the proposed chaotic TSO method is explained in detail. In the fifth section, the experimental results are given. This part consists of three separate stages. First of all, the proposed method was tested on the CEC’17 benchmark functions, and statistical analyses were made and supported by figures. Then the proposed method is adapted to five real-world engineering problems and the performance analyses of the proposed method and the standard TSO method are examined. Finally, the proposed methods and the TSO method on feature selection were adapted and performance analyses were carried out on classification problems. In the last section, Section 6, the conclusion part is included.
Literature review
Various optimization methods have been proposed in the literature that can be used in optimization problems. These methods have become very popular not only in computer science but also in other research areas (Altay, 2022a). Complex reliability allocation problems (Negi et al., 2021), traveling salesman problem (Mzili, Riffi & Mzili, 2022), association rule mining (Altay & Alatas, 2021), dynamic ship routing and scheduling problem (Das et al., 2022), laser cutting process (Madić et al., 2022), machine learning (Altay & Varol, 2023), and process synthesis problem (Altay, 2022b) are some of them. There are studies comparing the performance of metaheuristic methods (Sadhu et al., 2023).
There is no best optimization algorithm to solve all problems. While an optimization algorithm may solve one problem very well, it may not achieve successful results in another. This encourages researchers to propose new methods and improve existing ones. When the literature is examined, it is seen that many optimization algorithms have been proposed. Some of those include the group teaching optimization algorithm (Zhang & Jin, 2020), dwarf mongoose optimization algorithm (Agushaka, Ezugwu & Abualigah, 2022), chimp optimization algorithm (Khishe & Mosavi, 2020), material generation algorithm (Talatahari, Azizi & Gandomi, 2021), social mimic optimization algorithm (Balochian & Baloochian, 2019), arithmetic trigonometric optimization algorithm (Devan et al., 2022), fertilization optimization algorithm (Devan et al., 2022), African vultures optimization algorithm (Abdollahzadeh, Gharehchopogh & Mirjalili, 2021), aquila optimizer (Abualigah et al., 2021b), circle search algorithm (Qais et al., 2022), the water optimization algorithm (Daliri & Asghari, 2022), and the gold rush optimizer (Zolfi, 2023). The transient search algorithm is one of the physics-based metaheuristic methods that have emerged recently. This method has been tested on some problems, but as far as we know, there is no study related to the development of the method. The fact that it is a new method and that no improvement has been made in this area yet has been our source of motivation.
It is seen that the transient search algorithm has been successfully used in PEM fuel cell modeling (Hasanien et al., 2022), IoT intrusion detection system (Fatani et al., 2021), optimum allocation of more than one distributed generator in the radial electricity distribution network (Bhadoriya & Gupta, 2022), and improving the voltage ride-through capability of the wind turbine (Qais & Hasanien, 2020).
Chaos theory has been extensively employed to enhance exploration and exploitation as nonlinear theory has undergone constant study and improvement. Numerous metaheuristic algorithms’ premature convergence issues have been effectively resolved using chaos theory. Many researchers have added chaotic mapping mechanisms to various metaheuristic algorithms to augment the algorithm’s capacity to find optimum solutions, improve random diversification, and obtain optimal or sub-optimal answers in complicated multi-modal circumstances (Arora & Anand, 2019). The application of chaos theory to different metaheuristic methods can be summarized in Table 1.
| Ref. | Year | Proposed model | Chaotic maps | Application |
|---|---|---|---|---|
| Farah & Belazi (2018) | 2018 | Jaya algorithm | 2D cross chaotic map | Benchmark function |
| Zhang et al. (2018) | 2018 | Bacterial foraging optimization | Logistic map | Benchmark function |
| Sayed, Khoriba & Haggag (2018) | 2018 | Salp swarm algorithm | Ten different chaotic maps | Benchmark function and feature selection |
| Tuba et al. (2018) | 2018 | Elephant herding optimization | Two different chaotic maps | Benchmark function |
| Rizk-Allah, Hassanien & Bhattacharyya (2018) | 2018 | Crow search algorithm | Ten different chaotic maps | Benchmark function and real-world engineering design problem |
| Kaur & Arora (2018) | 2018 | Whale optimization algorithm | Ten different chaotic maps | Benchmark function |
| Sayed, Darwish & Hassanien (2018) | 2018 | Multi-verse optimization algorithm | Ten different chaotic maps | Real-world engineering design problem |
| Arora & Anand (2019) | 2018 | Grasshopper optimization algorithm | Ten different chaotic maps | Benchmark function |
| Li et al. (2019) | 2019 | Moth-flame optimization | Ten different chaotic maps | Benchmark function and real-world engineering design problem |
| Sayed, Tharwat & Hassanien (2019) | 2019 | Dragonfly algorithm | Ten different chaotic maps | Feature selection |
| Demir, Tuncer & Kocamaz (2020) | 2020 | Chaotic optimization algorithm |
Logistic-sine chaotic map | Benchmark function and real-world engineering design problem |
| Bingol & Alatas (2020) | 2020 | Optics inspired optimization | Five different chaotic maps | Benchmark function and real-world engineering design problem |
| Varol Altay & Alatas (2020) | 2020 | Bird swarm algorithm | Ten different chaotic maps | Benchmark function and real-world engineering design problems |
| Pierezan et al. (2021) | 2020 | Coyote optimization algorithm | Tinkerbell chaotic map | Truss optimization problems |
| Gharehchopogh, Maleki & Dizaji (2021) | 2021 | Vortex search algorithm | Ten different chaotic maps | Feature selection |
| Yang et al. (2021) | 2021 | Spherical evolution algorithm | Twelve different chaotic maps | Benchmark function |
| Mohammed & Rashid (2021) | 2021 | Fitness-dependent optimizer | Ten different chaotic maps | Benchmark function and real-world engineering design problems |
| Zhang & Ding (2021) | 2021 | Sparrow search algorithm |
Logistic map | Benchmark function and stochastic configuration network |
| Li et al. (2022) | 2021 | Arithmetic optimization algorithm | Ten different chaotic maps | Benchmark function and real-world engineering design problems |
| Kutlu Onay & Aydemіr (2022) | 2021 | Hunger games search optimization | Ten different chaotic maps | Benchmark function and real-world engineering design problems |
| Altay (2022c) | 2022 | Slime mould optimization | Ten different chaotic maps | Benchmark function and real-world engineering design problems |
| Abualigah & Diabat (2022) | 2022 | Group search optimizer | Five different chaotic maps | Feature selection |
Tso algorithm
In this section, the background of the TSO algorithm and the operation of the method are discussed. Pseudo code of TSO algorithm is given.
Background of transient search optimization algorithm
The transient performance of electrical circuits has been the inspiration for the metaheuristic optimization method TSO, which has been proposed in recent years. Electrical circuits contain different elements that store energy. These can be capacitors (C), inductors (L), or a combination of both (LC). Generally, an electrical circuit containing a resistor (R), C, or L has a transient response and a steady-state response. This situation is shown in Eq. (1). If the electrical circuit contains an energy storage element together with the resistor, these circuits are classified as first-order circuits. If there are two energy storage elements next to the resistor in the electrical circuit, they are called second-order circuits. The switching of such circuits cannot be changed until the steady-state values of R and L are reached. The transient response of the first-order circuit is calculated by the differential equation in Eq. (2). Equation (2) can be solved to find the solution of shown in Eq. (3).
(1)
(2)
(3) where time , can be called the capacitor voltage of the RC circuit or the inductor current of the RL circuit. is called the time constant of the circuit. and are for circuit RC and RL, respectively, and is a constant based on the initial value of . is the final response value. The transient response of a quadratic circuit is calculated using the differential equation shown in Eq. (4). The solution of the quadratic differential equation is shown in Eq. (5). Here, the response of the RLC circuit is considered a low-damped response.
(4)
(5) where is the damping coefficient, is the resonant frequency, is the damped resonance frequency, and ve are fixed values. The low damped response occurs when causes damped oscillations of the transient response of the RLC circuit.
Transient optimization algorithm
The working logic of the TSO algorithm is similar to the working logic of other metaheuristic optimization algorithms and consists of three steps. In the first of these steps, the initial population is created by creating search agents within the lower and upper limits of the exploration area. The second step is called the exploration phase. In this step, the best solution is sought. The third and final step is called the exploitation stage, and it is aimed at reaching a steady state or the best solution. Search agents in the initial population are randomly generated as in Eq. (6).
(6) where the value represents the lower limit of the search area, and the value the upper limit of the search area. The value represents a uniformly distributed random sequence of numbers. The second step, the discovery phase, is designed by inspired by the oscillations of the second order RLC circuits around zero. However, the use of TSO here is inspired by the exponential decay of the first order discharge. The value, which is a random number, is used to balance the exploration ( ) and exploitation phases. The use and mathematical model of TSO is shown in Eq. (7), inspired by Eqs. (3) and (5). TSO’s best solution , simulates the steady state or final value of the electrical circuit, also .
(7)
(8)
(9)
(10)
In Eq. (10), represents a value ranging from 2 to 0 as understood from the equation. The value represents the number of iterations, and are random coefficients, , and are evenly distributed random numbers and take values between 0 and 1. indicates the best position, is a constant and is the maximum number of iterations. The balance between exploration and exploitation processes is achieved with a coefficient ranging from −2 to 2. Exploitation phase is obtained when (to the smallest value) and exploration process is obtained when (to the highest value). The pseudo-code of TSO is given in Algorithm 1.
| Initialize the population and the best positions , |
| Evaluate the cost function of the population |
| while |
| Update the values of and using Eqs. (8) and (9) |
| do all populations |
| Update the population place by Eq. (7) |
| end do |
| Calculate the cost function of all new population |
| Update the best value if the recent cost function is less than the previous best cost function |
| end while |
| Output the best value |
Chaotic maps
In a nonlinear, dynamical system that is non-periodic, non-convergent, and bounded, chaos is a deterministic, random-like technique. Chaos is the randomness of a straightforward deterministic dynamical system in mathematics, and chaotic systems can be thought of as sources of randomness. Although chaos appears random and unpredictable, it also has a certain degree of pattern. Instead of using random variables, chaos uses chaotic variables (Arora & Anand, 2019).
Numbers generated by chaotic maps have been used successfully in a variety of applications. In general, chaotic maps have three basic qualities: ergodicity, beginning conditions, and semi-stochastic properties. Researchers in a variety of domains, including ecology, medicine, economics, and engineering applications, are drawn to chaotic processes. It is also extensively utilized to improve the performance of optimization algorithms (Altay, 2022c).
The effectiveness of swarm intelligence algorithms in tackling a variety of challenging optimization issues has been demonstrated. As a result, further developing these algorithms became a hotly debated scientific subject. The use of chaotic maps in place of random values in swarm intelligence algorithms is one of the more frequently employed innovations. Improved search is anticipated because chaotic maps produce numbers that are non-repeatable and ergodic (Tuba et al., 2018).
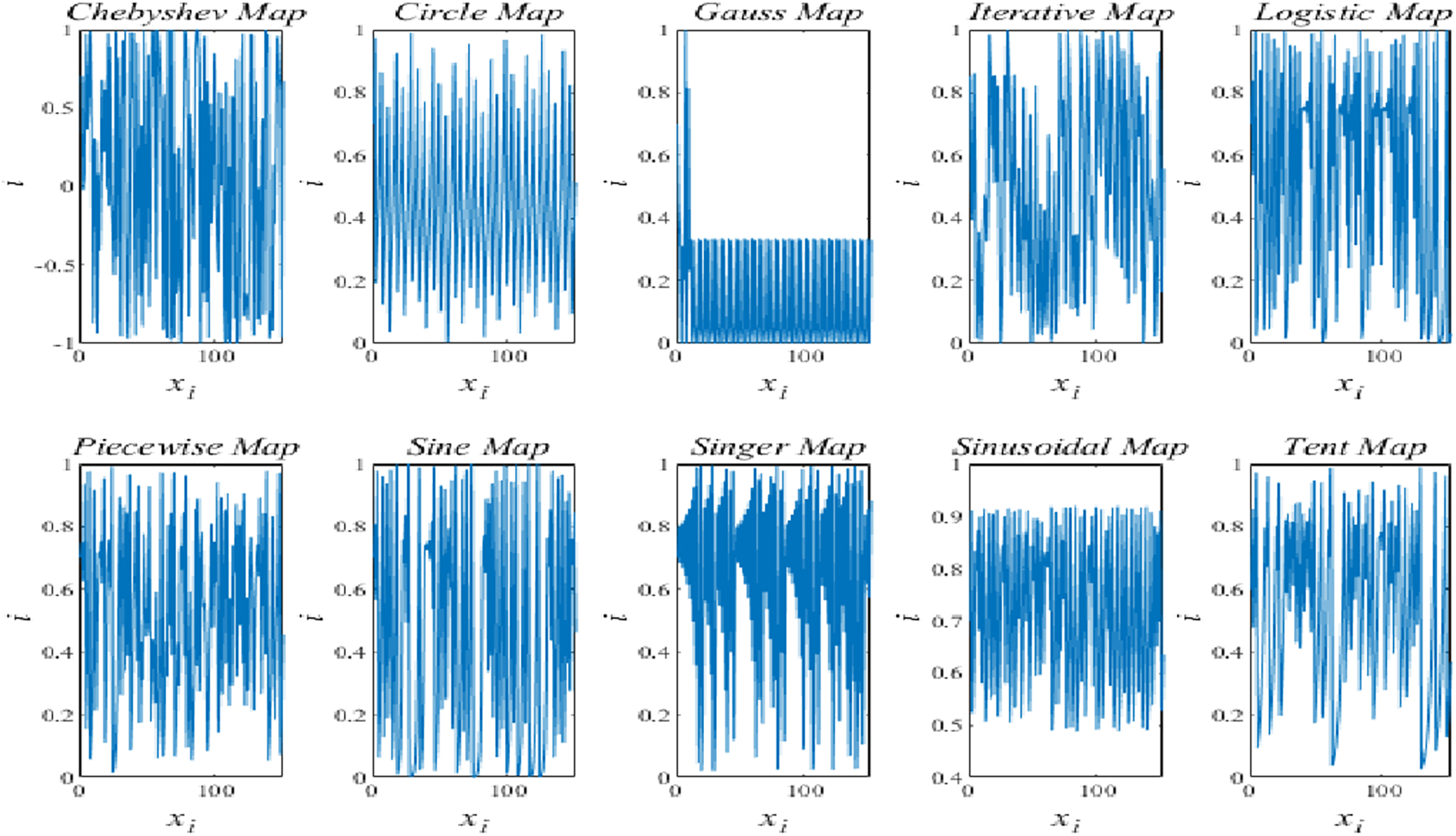
Chaotic map applications have proven successful in enhancing the stochastic structure of the optimization techniques in a variety of research. The standard TSO’s global convergence time was accelerated in this work by the introduction of ten separate chaotic maps, which also prevented the standard TSO from being stuck in local solutions. There are many types of chaotic maps that are employed, including the gauss, circle, sine, logistic, piecewise, iterative, singer, tent, and sinusoidal maps. Table 2 presents an explanation of the variables and equations linked to these chaotic maps. The graphics of the ten chaotic maps are shown in Fig. 1.
| CM no. | CM name | CM equation |
|---|---|---|
| 1 | Chebyshev map | |
| 2 | Circle map | and |
| 3 | Gauss map | , |
| 4 | Iterative map | , |
| 5 | Logistic map | , |
| 6 | Piecewise map | , |
| 7 | Sine map | , |
| 8 | Singer map | , µ = 1.07 |
| 9 | Sinusoidal map | , and |
| 10 | Tent map |
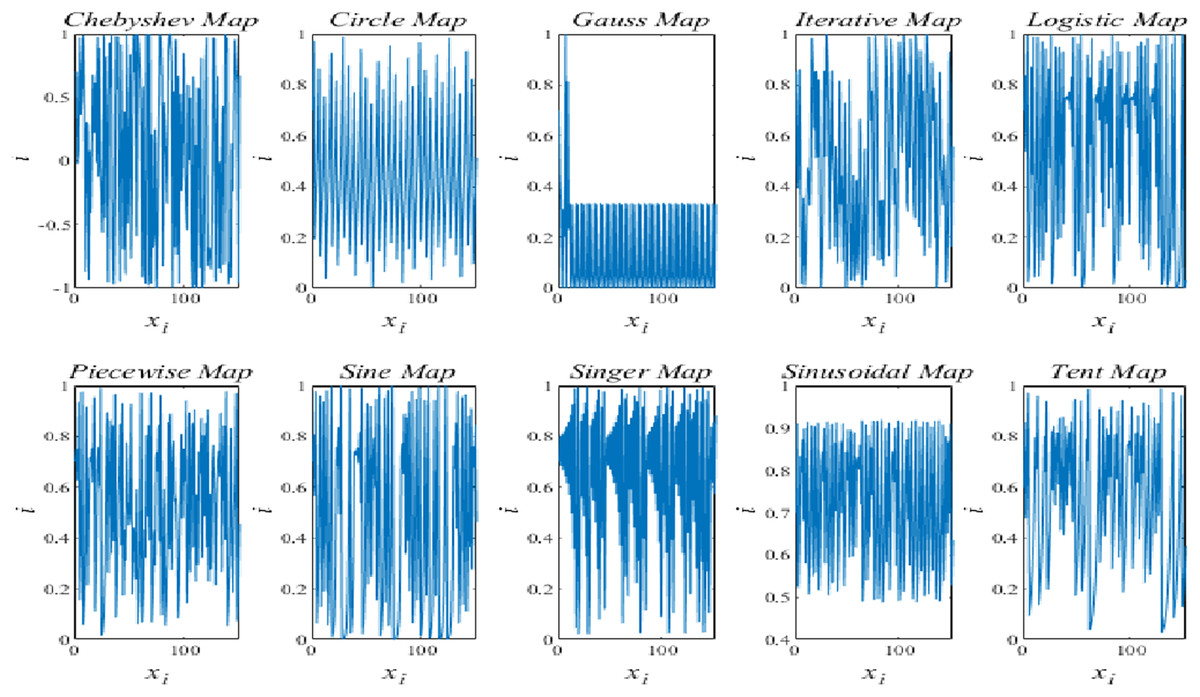
Figure 1: Demonstration of chaotic maps.
{kind=link}
Chaotic tso algorithm
Metaheuristic optimization algorithms suffer from population diversity and early convergence. In addition, the metaheuristic optimization algorithm needs a balance between exploration and exploitation in order to produce an effective solution. Chaotic maps are one of the most effective ways to increase population diversity and the quality of metaheuristic optimization methods. Thus, both the search sensitivity and convergence speed of the metaheuristic optimization method, which are improved with the chaotic map, are improved. Most metaheuristic optimization methods have an exploration and exploitation phase. The exploration phase is used to search the search area as wide as possible, regardless of whether the method is stuck at the local optimum. In the exploitation phase, the method aims to find the best possible solution in a limited area of the search space by finding the most promising area. While the method spends too much time on the exploitation process, which only leads to a local search, spending too much time on the exploration process results in a random search.
Although the newly proposed TSO algorithm has been successfully applied in different applications in the literature, it has some disadvantages, as we mentioned above. Therefore, in order to improve the search space of the TSO algorithm, chaotic maps, which are accepted in the literature, have been added to the dynamic behavior and optimization algorithms to make the search space stronger. Equation (7) is used for exploration and exploitation in the TSO algorithm, whose working principle is very clear. Random variables affecting Eq. (7) are regular random variable values and in Eqs. (8) and (9), respectively. In this study, instead of the value, which is the stochastic component of the TSO algorithm in Eq. (9), chaotic maps with different mathematical equations listed in Table 2 were applied. The mathematical equation is shown in the equation below.
(11)
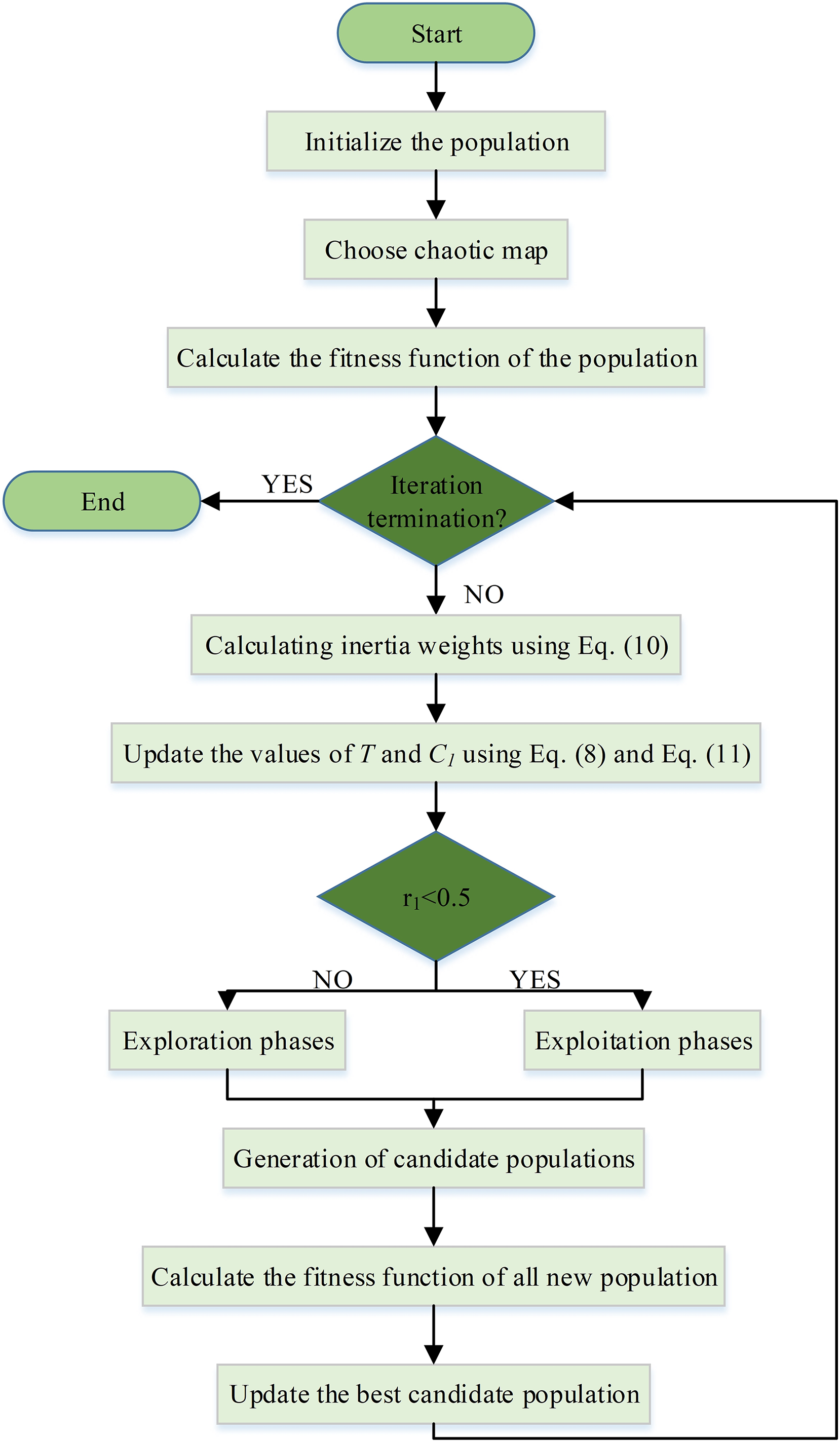
Here, , that is, sequentially generated chaotic map value is used instead of value. Proposed algorithms using 10 different chaotic map; chebyshev map (CTSO-1), circle map (CTSO-2), gauss map (CTSO-3), iterative map (CTSO-4), logistic map (CTSO-5), piecewise map (CTSO-6), sine map (CTSO-7), singer map (CTSO-8), sinusoidal map (CTSO-9) and tent map (CTSO-10). The flowchart of the CTSO is shown in Fig. 2.
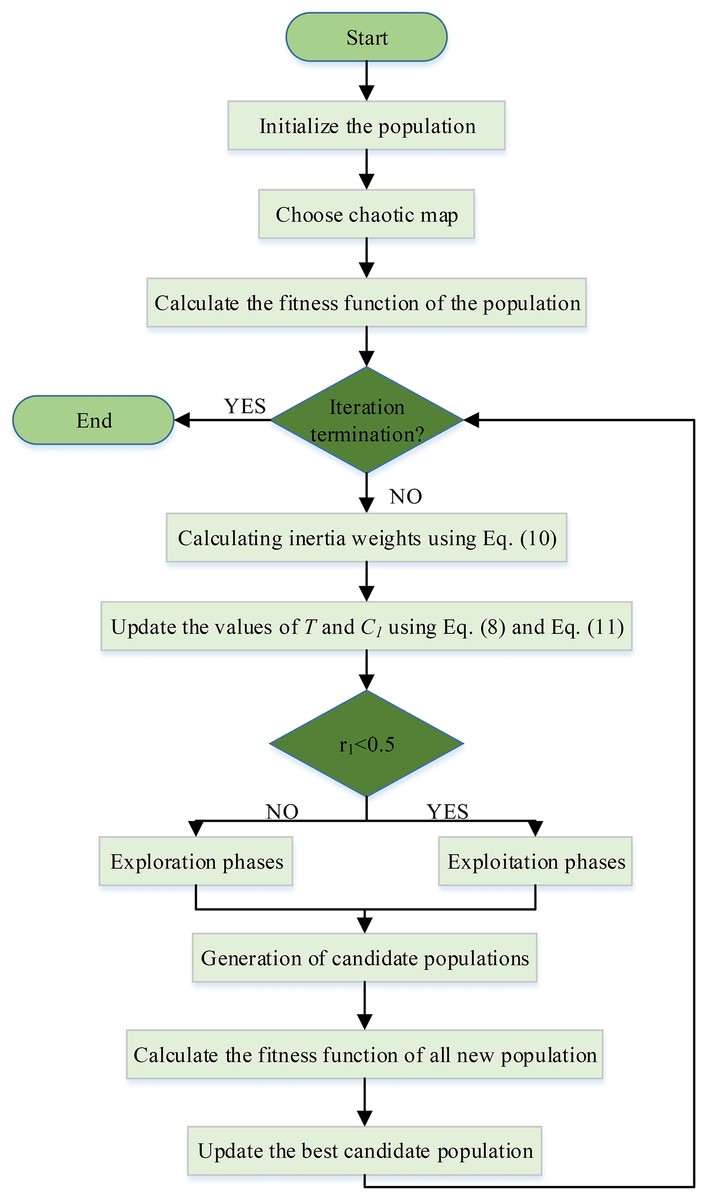
Figure 2: Flowchart of CTSOs.
{kind=link}
Also, the complexity of the proposed CTSO algorithms can be expressed using big-oh notation. The process of the CTSO algorithm starts with the random generation of search agents in the first step, evaluates the search agents using the cost function in the second step, and updates the search agents to the function evaluation value in the third step. Here, the first step is denoted by , where is the number of search agents. In the second step, the search agents enter the while loop, which has the maximum iteration ( ). The complexity of function evaluations of all search agents is expressed as . And finally, in the third step, the complexity of updating all search agents with a size for total iterations is expressed as .
Results and discussion
In order to evaluate the performance of the methods proposed in the study, CEC’17 test functions, five different real-world problems, and feature selection problems consisting of 10 different real-world datasets were applied. The results obtained were compared in detail under this section and the performance analyses of the methods were carried out. In all tables, the use of bold demonstrates the best result attained. TSO and CTSOs are taken as constant parameters with value of 1 and value of . The experimental tests are performed using MATLAB R2021a and the whole test is executed on a PC (Intel (R) Core (TM) i9–10900k CPU @ 3.70 GHz (10 CPUs), 32 GB, Windows 10–64 bits).
Benchmark function
The performance evaluation of ten distinct CTSO and TSO methods was conducted using the IEEE Congress on Evolutionary Computation (CEC) test functions. The CEC’17 test suite comprises a total of 29 test functions, encompassing a diverse range of function types such as unimodal, multimodal, hybrid, and composition functions. The algorithm’s convergence performance is assessed using unimodal functions, namely f1 and f3, while the presence of early convergence and local fixation issues is evaluated using multimodal functions, specifically f4 through f10. The assessment of the capacity to evade local optima, which are characterized by numerous local optima, and the equilibrium between exploration and exploitation is carried out through the utilization of hybrid and composition functions (f11–f20 and f21–f30).
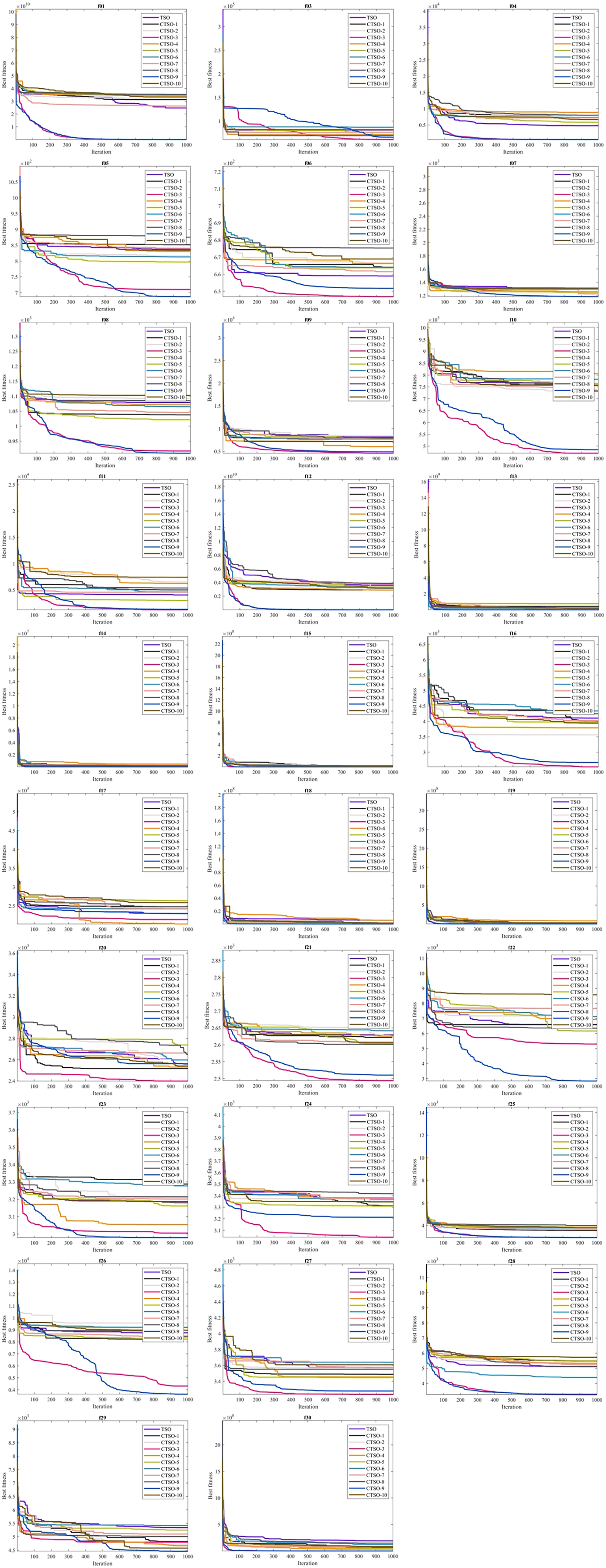
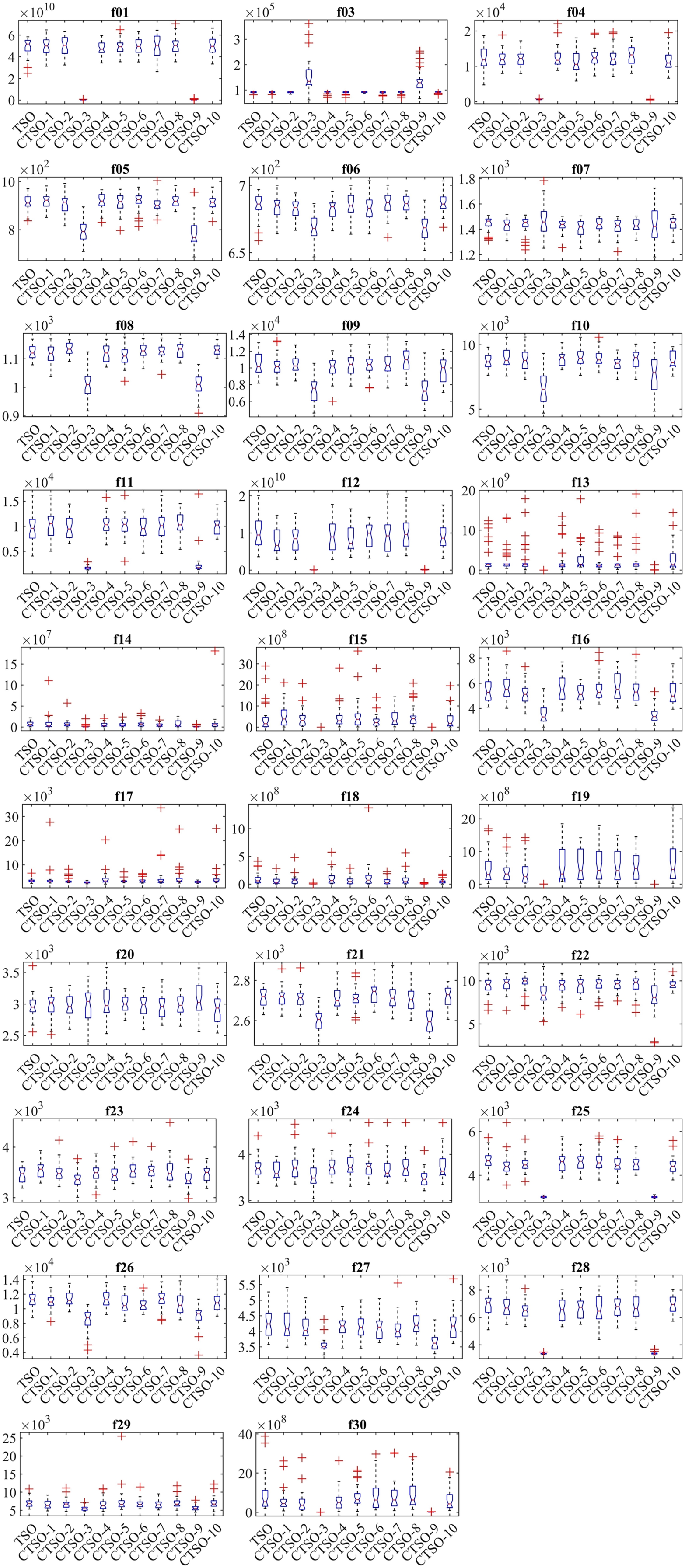
The lower and upper bounds of all functions included in the CEC’17 test suite are between −100 and 100. In order to make a fair evaluation under equal conditions, the number of evaluations was chosen as 1,000 and the population as 30. Algorithms were run 30 times in all experiments, and the results of mean (AVG), standard deviation (STD), minimum (MIN), and Friedman mean rank (MR) values are presented in Tables 3A–3C in a comparative manner. According to the MR value, CTSO-9 and CTSO-5 showed the best performance in unimodal benchmark functions. Of the multimodal functions, CTSO-3 showed the best performance in 3, CTSO-9 in 2, CTSO-3 and CTSO-9 in 1, and CTSO-5 in 1 of them. Of the hybrid and composition functions, CTSO-3 showed the best performance in 11, CTSO-9 in 6, CTSO-3 and CTSO-9 in 2, and CTSO-10 in 1 of them. In Table 4, the average Friedman mean rank values based on the MR values of all benchmark functions are given. When Table 4 is examined according to the statistical analysis results, CTSO-3 gives the best performance, followed by CTSO-9 with a close value. CTSO-8 performed worse than the original TSO. The convergence performance of the algorithms on the CEC’17 test functions is also given in Fig. 3 according to the best values of the algorithms. Figure 4 presents a boxplot of CEC’17 test functions.
| Table 3-A | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Algorithm | AVG | STD | MIN | MR | Algorithm | AVG | STD | MIN | MR |
| f1 | f3 | ||||||||
| TSO | 4.95E+10 | 8.21E+09 | 2.48E+10 | 7.20 | TSO | 9.11E+04 | 3.47E+03 | 8.10E+04 | 5.47 |
| CTSO-1 | 4.92E+10 | 8.39E+09 | 3.13E+10 | 7.13 | CTSO-1 | 9.14E+04 | 3.08E+03 | 8.21E+04 | 5.13 |
| CTSO-2 | 4.99E+10 | 8.71E+09 | 3.24E+10 | 7.33 | CTSO-2 | 9.09E+04 | 3.33E+03 | 8.32E+04 | 5.10 |
| CTSO-3 | 1.57E+08 | 1.45E+08 | 1.86E+07 | 1.53 | CTSO-3 | 1.55E+05 | 6.93E+04 | 6.08E+04 | 9.30 |
| CTSO-4 | 4.79E+10 | 6.77E+09 | 3.44E+10 | 6.33 | CTSO-4 | 9.13E+04 | 5.09E+03 | 7.18E+04 | 6.27 |
| CTSO-5 | 4.97E+10 | 7.32E+09 | 3.54E+10 | 6.87 | CTSO-5 | 9.02E+04 | 5.42E+03 | 6.97E+04 | 4.77 |
| CTSO-6 | 4.96E+10 | 7.20E+09 | 3.52E+10 | 6.90 | CTSO-6 | 9.19E+04 | 2.38E+03 | 8.70E+04 | 5.53 |
| CTSO-7 | 4.98E+10 | 9.49E+09 | 2.63E+10 | 7.20 | CTSO-7 | 9.06E+04 | 4.41E+03 | 7.63E+04 | 5.03 |
| CTSO-8 | 5.01E+10 | 9.07E+09 | 3.54E+10 | 6.80 | CTSO-8 | 9.04E+04 | 6.25E+03 | 6.91E+04 | 5.53 |
| CTSO-9 | 1.83E+08 | 2.95E+08 | 3.75E+07 | 1.47 | CTSO-9 | 1.36E+05 | 4.90E+04 | 6.55E+04 | 8.90 |
| CTSO-10 | 4.95E+10 | 8.31E+09 | 3.34E+10 | 7.23 | CTSO-10 | 9.13E+04 | 3.25E+03 | 8.17E+04 | 4.97 |
| f4 | f5 | ||||||||
| TSO | 1.23E+04 | 3.21E+03 | 4.76E+03 | 7.17 | TSO | 9.12E+02 | 3.32E+01 | 8.37E+02 | 6.57 |
| CTSO-1 | 1.19E+04 | 2.29E+03 | 7.99E+03 | 6.67 | CTSO-1 | 9.19E+02 | 3.13E+01 | 8.51E+02 | 7.77 |
| CTSO-2 | 1.20E+04 | 2.21E+03 | 7.98E+03 | 6.83 | CTSO-2 | 9.06E+02 | 4.49E+01 | 8.16E+02 | 6.30 |
| CTSO-3 | 6.16E+02 | 6.91E+01 | 5.26E+02 | 1.50 | CTSO-3 | 7.94E+02 | 4.53E+01 | 7.10E+02 | 1.77 |
| CTSO-4 | 1.25E+04 | 2.95E+03 | 8.86E+03 | 7.30 | CTSO-4 | 9.16E+02 | 3.51E+01 | 8.30E+02 | 7.23 |
| CTSO-5 | 1.13E+04 | 3.14E+03 | 5.83E+03 | 6.20 | CTSO-5 | 9.09E+02 | 3.83E+01 | 7.97E+02 | 6.77 |
| CTSO-6 | 1.23E+04 | 2.99E+03 | 7.30E+03 | 7.47 | CTSO-6 | 9.17E+02 | 3.78E+01 | 8.13E+02 | 7.63 |
| CTSO-7 | 1.24E+04 | 3.15E+03 | 7.15E+03 | 7.13 | CTSO-7 | 9.07E+02 | 3.14E+01 | 8.41E+02 | 6.23 |
| CTSO-8 | 1.31E+04 | 2.72E+03 | 8.01E+03 | 7.83 | CTSO-8 | 9.20E+02 | 2.67E+01 | 8.76E+02 | 7.43 |
| CTSO-9 | 6.07E+02 | 4.59E+01 | 4.94E+02 | 1.50 | CTSO-9 | 7.83E+02 | 5.52E+01 | 6.87E+02 | 1.73 |
| CTSO-10 | 1.17E+04 | 3.39E+03 | 6.65E+03 | 6.40 | CTSO-10 | 9.10E+02 | 2.71E+01 | 8.34E+02 | 6.57 |
| f6 | f7 | ||||||||
| TSO | 6.85E+02 | 8.78E+00 | 6.59E+02 | 7.23 | TSO | 1.44E+03 | 5.86E+01 | 1.31E+03 | 6.73 |
| CTSO-1 | 6.83E+02 | 8.22E+00 | 6.64E+02 | 6.17 | CTSO-1 | 1.43E+03 | 5.71E+01 | 1.31E+03 | 5.97 |
| CTSO-2 | 6.82E+02 | 7.18E+00 | 6.67E+02 | 5.97 | CTSO-2 | 1.43E+03 | 6.92E+01 | 1.24E+03 | 6.03 |
| CTSO-3 | 6.67E+02 | 1.08E+01 | 6.47E+02 | 2.17 | CTSO-3 | 1.46E+03 | 1.27E+02 | 1.25E+03 | 6.70 |
| CTSO-4 | 6.83E+02 | 7.81E+00 | 6.66E+02 | 6.07 | CTSO-4 | 1.43E+03 | 5.07E+01 | 1.26E+03 | 5.87 |
| CTSO-5 | 6.86E+02 | 8.16E+00 | 6.64E+02 | 7.17 | CTSO-5 | 1.41E+03 | 7.34E+01 | 1.25E+03 | 4.70 |
| CTSO-6 | 6.84E+02 | 1.02E+01 | 6.64E+02 | 6.37 | CTSO-6 | 1.43E+03 | 5.70E+01 | 1.30E+03 | 6.23 |
| CTSO-7 | 6.87E+02 | 8.70E+00 | 6.61E+02 | 7.73 | CTSO-7 | 1.42E+03 | 6.65E+01 | 1.22E+03 | 5.30 |
| CTSO-8 | 6.86E+02 | 6.16E+00 | 6.75E+02 | 7.20 | CTSO-8 | 1.43E+03 | 5.03E+01 | 1.31E+03 | 5.80 |
| CTSO-9 | 6.70E+02 | 1.04E+01 | 6.52E+02 | 2.73 | CTSO-9 | 1.44E+03 | 1.36E+02 | 1.18E+03 | 6.10 |
| CTSO-10 | 6.86E+02 | 7.40E+00 | 6.69E+02 | 7.20 | CTSO-10 | 1.45E+03 | 5.05E+01 | 1.30E+03 | 6.57 |
| f8 | f9 | ||||||||
| TSO | 1.12E+03 | 2.52E+01 | 1.08E+03 | 6.63 | TSO | 1.05E+04 | 1.34E+03 | 8.17E+03 | 7.13 |
| CTSO-1 | 1.12E+03 | 3.33E+01 | 1.04E+03 | 6.50 | CTSO-1 | 1.03E+04 | 1.32E+03 | 7.94E+03 | 6.70 |
| CTSO-2 | 1.13E+03 | 2.10E+01 | 1.09E+03 | 7.93 | CTSO-2 | 1.04E+04 | 1.07E+03 | 8.43E+03 | 6.87 |
| CTSO-3 | 1.01E+03 | 4.72E+01 | 9.17E+02 | 1.73 | CTSO-3 | 7.25E+03 | 1.57E+03 | 4.58E+03 | 2.00 |
| CTSO-4 | 1.12E+03 | 2.95E+01 | 1.07E+03 | 6.43 | CTSO-4 | 1.01E+04 | 1.31E+03 | 6.02E+03 | 6.30 |
| CTSO-5 | 1.11E+03 | 3.19E+01 | 1.02E+03 | 5.63 | CTSO-5 | 1.03E+04 | 1.23E+03 | 7.82E+03 | 7.07 |
| CTSO-6 | 1.13E+03 | 2.50E+01 | 1.07E+03 | 7.37 | CTSO-6 | 1.03E+04 | 1.19E+03 | 7.59E+03 | 7.10 |
| CTSO-7 | 1.13E+03 | 2.54E+01 | 1.05E+03 | 6.97 | CTSO-7 | 1.05E+04 | 1.44E+03 | 7.58E+03 | 6.70 |
| CTSO-8 | 1.13E+03 | 2.69E+01 | 1.08E+03 | 7.73 | CTSO-8 | 1.08E+04 | 1.46E+03 | 7.90E+03 | 7.73 |
| CTSO-9 | 1.01E+03 | 4.35E+01 | 9.09E+02 | 1.50 | CTSO-9 | 7.43E+03 | 1.65E+03 | 4.89E+03 | 2.40 |
| CTSO-10 | 1.13E+03 | 1.82E+01 | 1.10E+03 | 7.57 | CTSO-10 | 9.85E+03 | 1.47E+03 | 7.05E+03 | 6.00 |
| f10 | f11 | ||||||||
| TSO | 8.69E+03 | 5.78E+02 | 7.64E+03 | 5.73 | TSO | 9.85E+03 | 3.09E+03 | 4.06E+03 | 6.40 |
| CTSO-1 | 8.95E+03 | 6.98E+02 | 7.58E+03 | 6.83 | CTSO-1 | 1.05E+04 | 2.80E+03 | 5.00E+03 | 7.07 |
| CTSO-2 | 8.83E+03 | 8.47E+02 | 7.30E+03 | 6.77 | CTSO-2 | 9.79E+03 | 2.15E+03 | 6.53E+03 | 6.77 |
| CTSO-3 | 6.73E+03 | 1.33E+03 | 4.70E+03 | 2.37 | CTSO-3 | 1.68E+03 | 3.27E+02 | 1.24E+03 | 1.40 |
| CTSO-4 | 8.86E+03 | 5.27E+02 | 8.05E+03 | 6.43 | CTSO-4 | 1.04E+04 | 2.00E+03 | 6.26E+03 | 7.10 |
| CTSO-5 | 9.01E+03 | 6.78E+02 | 7.64E+03 | 7.40 | CTSO-5 | 1.01E+04 | 2.33E+03 | 3.00E+03 | 7.20 |
| CTSO-6 | 8.99E+03 | 7.03E+02 | 7.82E+03 | 7.33 | CTSO-6 | 9.57E+03 | 2.20E+03 | 4.63E+03 | 6.60 |
| CTSO-7 | 8.49E+03 | 5.62E+02 | 7.30E+03 | 5.40 | CTSO-7 | 1.01E+04 | 2.73E+03 | 4.57E+03 | 6.90 |
| CTSO-8 | 8.93E+03 | 7.24E+02 | 7.33E+03 | 7.27 | CTSO-8 | 1.04E+04 | 2.16E+03 | 5.38E+03 | 7.50 |
| CTSO-9 | 7.66E+03 | 1.41E+03 | 4.85E+03 | 4.03 | CTSO-9 | 2.52E+03 | 2.84E+03 | 1.33E+03 | 1.90 |
| CTSO-10 | 8.81E+03 | 6.64E+02 | 7.56E+03 | 6.43 | CTSO-10 | 1.01E+04 | 1.77E+03 | 7.43E+03 | 7.17 |
| Table 3-B | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Algorithm | AVG | STD | MIN | MR | Algorithm | AVG | STD | MIN | MR |
| f12 | f13 | ||||||||
| TSO | 1.01E+10 | 4.02E+09 | 3.60E+09 | 7.70 | TSO | 2.70E+09 | 3.49E+09 | 2.27E+08 | 6.57 |
| CTSO-1 | 7.78E+09 | 3.34E+09 | 2.90E+09 | 6.20 | CTSO-1 | 2.53E+09 | 3.16E+09 | 4.33E+08 | 7.50 |
| CTSO-2 | 8.51E+09 | 3.52E+09 | 2.90E+09 | 6.70 | CTSO-2 | 2.84E+09 | 4.16E+09 | 6.69E+07 | 7.00 |
| CTSO-3 | 2.04E+07 | 2.31E+07 | 6.18E+05 | 1.53 | CTSO-3 | 5.68E+04 | 4.66E+04 | 1.14E+04 | 1.33 |
| CTSO-4 | 8.93E+09 | 3.95E+09 | 2.87E+09 | 6.90 | CTSO-4 | 2.46E+09 | 3.43E+09 | 8.13E+07 | 6.57 |
| CTSO-5 | 8.59E+09 | 3.59E+09 | 3.45E+09 | 6.57 | CTSO-5 | 2.92E+09 | 3.56E+09 | 7.57E+08 | 7.53 |
| CTSO-6 | 9.35E+09 | 3.31E+09 | 3.23E+09 | 7.30 | CTSO-6 | 1.89E+09 | 2.52E+09 | 1.55E+08 | 6.40 |
| CTSO-7 | 9.48E+09 | 4.68E+09 | 3.75E+09 | 7.20 | CTSO-7 | 2.27E+09 | 2.67E+09 | 1.58E+08 | 6.70 |
| CTSO-8 | 9.97E+09 | 4.17E+09 | 3.87E+09 | 7.43 | CTSO-8 | 2.98E+09 | 4.32E+09 | 1.60E+08 | 7.20 |
| CTSO-9 | 2.47E+07 | 3.62E+07 | 1.01E+06 | 1.47 | CTSO-9 | 4.67E+07 | 2.36E+08 | 1.40E+04 | 1.80 |
| CTSO-10 | 9.12E+09 | 3.70E+09 | 3.15E+09 | 7.00 | CTSO-10 | 3.02E+09 | 3.45E+09 | 2.00E+08 | 7.40 |
| f14 | f15 | ||||||||
| TSO | 7.27E+06 | 5.82E+06 | 3.40E+05 | 7.27 | TSO | 4.34E+08 | 6.96E+08 | 7.91E+06 | 6.07 |
| CTSO-1 | 1.01E+07 | 2.04E+07 | 1.53E+05 | 6.33 | CTSO-1 | 5.47E+08 | 5.45E+08 | 1.82E+06 | 7.47 |
| CTSO-2 | 7.56E+06 | 1.02E+07 | 2.16E+05 | 7.27 | CTSO-2 | 4.20E+08 | 4.48E+08 | 2.70E+07 | 6.97 |
| CTSO-3 | 1.45E+06 | 3.77E+06 | 3.86E+03 | 2.43 | CTSO-3 | 1.64E+04 | 1.28E+04 | 3.64E+03 | 1.50 |
| CTSO-4 | 5.56E+06 | 5.02E+06 | 4.65E+05 | 6.57 | CTSO-4 | 4.58E+08 | 5.59E+08 | 1.23E+07 | 7.20 |
| CTSO-5 | 6.28E+06 | 5.64E+06 | 2.45E+05 | 6.73 | CTSO-5 | 5.61E+08 | 7.55E+08 | 6.00E+06 | 7.17 |
| CTSO-6 | 8.11E+06 | 7.55E+06 | 2.68E+05 | 7.50 | CTSO-6 | 3.62E+08 | 5.47E+08 | 1.49E+07 | 6.33 |
| CTSO-7 | 4.99E+06 | 3.97E+06 | 3.18E+05 | 6.07 | CTSO-7 | 4.26E+08 | 3.91E+08 | 1.32E+07 | 7.40 |
| CTSO-8 | 7.43E+06 | 7.47E+06 | 8.20E+04 | 6.57 | CTSO-8 | 5.19E+08 | 5.05E+08 | 2.04E+07 | 7.80 |
| CTSO-9 | 9.26E+05 | 1.87E+06 | 5.91E+03 | 2.33 | CTSO-9 | 1.69E+04 | 1.30E+04 | 2.28E+03 | 1.50 |
| CTSO-10 | 1.21E+07 | 3.24E+07 | 2.11E+05 | 6.93 | CTSO-10 | 3.68E+08 | 4.55E+08 | 4.16E+06 | 6.60 |
| f16 | f17 | ||||||||
| TSO | 5.48E+03 | 9.37E+02 | 8.03E+03 | 7.17 | TSO | 3.45E+03 | 7.68E+02 | 2.30E+03 | 7.00 |
| CTSO-1 | 5.74E+03 | 1.07E+03 | 8.56E+03 | 7.43 | CTSO-1 | 4.19E+03 | 4.53E+03 | 2.48E+03 | 6.43 |
| CTSO-2 | 5.17E+03 | 9.01E+02 | 7.32E+03 | 6.30 | CTSO-2 | 3.50E+03 | 1.28E+03 | 2.64E+03 | 5.47 |
| CTSO-3 | 3.55E+03 | 7.81E+02 | 5.57E+03 | 2.07 | CTSO-3 | 2.74E+03 | 3.60E+02 | 2.14E+03 | 3.00 |
| CTSO-4 | 5.58E+03 | 1.08E+03 | 7.68E+03 | 6.97 | CTSO-4 | 4.32E+03 | 3.29E+03 | 2.02E+03 | 6.93 |
| CTSO-5 | 5.16E+03 | 6.95E+02 | 6.30E+03 | 6.37 | CTSO-5 | 3.35E+03 | 8.24E+02 | 2.63E+03 | 6.23 |
| CTSO-6 | 5.53E+03 | 9.81E+02 | 8.44E+03 | 7.13 | CTSO-6 | 3.56E+03 | 1.03E+03 | 2.42E+03 | 6.20 |
| CTSO-7 | 5.71E+03 | 1.05E+03 | 7.73E+03 | 7.37 | CTSO-7 | 5.03E+03 | 6.07E+03 | 2.42E+03 | 6.20 |
| CTSO-8 | 5.44E+03 | 9.72E+02 | 8.31E+03 | 6.57 | CTSO-8 | 4.64E+03 | 4.14E+03 | 2.47E+03 | 7.37 |
| CTSO-9 | 3.49E+03 | 6.43E+02 | 5.33E+03 | 1.93 | CTSO-9 | 2.94E+03 | 3.69E+02 | 2.29E+03 | 4.53 |
| CTSO-10 | 5.29E+03 | 1.03E+03 | 7.54E+03 | 6.70 | CTSO-10 | 4.58E+03 | 4.16E+03 | 2.58E+03 | 6.63 |
| f18 | f19 | ||||||||
| TSO | 9.48E+07 | 1.03E+08 | 5.85E+06 | 7.57 | TSO | 4.94E+08 | 4.74E+08 | 1.90E+07 | 6.77 |
| CTSO-1 | 6.32E+07 | 6.84E+07 | 1.73E+06 | 6.67 | CTSO-1 | 3.97E+08 | 3.36E+08 | 2.65E+07 | 6.60 |
| CTSO-2 | 7.71E+07 | 9.13E+07 | 1.58E+06 | 6.90 | CTSO-2 | 3.78E+08 | 3.98E+08 | 2.84E+07 | 5.97 |
| CTSO-3 | 1.20E+06 | 3.65E+06 | 9.33E+04 | 1.53 | CTSO-3 | 1.68E+05 | 5.67E+05 | 2.92E+03 | 1.43 |
| CTSO-4 | 1.08E+08 | 1.26E+08 | 5.89E+06 | 7.73 | CTSO-4 | 5.81E+08 | 4.94E+08 | 8.05E+07 | 7.23 |
| CTSO-5 | 6.37E+07 | 7.02E+07 | 1.02E+06 | 6.30 | CTSO-5 | 5.74E+08 | 4.75E+08 | 2.91E+07 | 7.37 |
| CTSO-6 | 1.36E+08 | 2.52E+08 | 2.39E+06 | 7.60 | CTSO-6 | 5.88E+08 | 5.07E+08 | 2.55E+07 | 7.10 |
| CTSO-7 | 5.56E+07 | 6.10E+07 | 2.13E+06 | 6.27 | CTSO-7 | 5.15E+08 | 4.67E+08 | 1.45E+07 | 6.93 |
| CTSO-8 | 9.00E+07 | 1.17E+08 | 1.06E+06 | 7.27 | CTSO-8 | 5.74E+08 | 4.58E+08 | 3.09E+07 | 7.33 |
| CTSO-9 | 2.68E+06 | 6.58E+06 | 3.96E+04 | 1.87 | CTSO-9 | 6.94E+04 | 1.61E+05 | 2.21E+03 | 1.57 |
| CTSO-10 | 5.50E+07 | 5.24E+07 | 9.39E+05 | 6.30 | CTSO-10 | 6.64E+08 | 6.30E+08 | 2.52E+07 | 7.70 |
| f20 | f21 | ||||||||
| TSO | 2.97E+03 | 1.91E+02 | 2.56E+03 | 5.43 | TSO | 2.72E+03 | 4.50E+01 | 2.63E+03 | 7.07 |
| CTSO-1 | 2.97E+03 | 1.91E+02 | 2.52E+03 | 6.50 | CTSO-1 | 2.72E+03 | 5.31E+01 | 2.62E+03 | 7.20 |
| CTSO-2 | 2.97E+03 | 1.59E+02 | 2.60E+03 | 5.80 | CTSO-2 | 2.71E+03 | 4.52E+01 | 2.62E+03 | 6.80 |
| CTSO-3 | 2.99E+03 | 2.50E+02 | 2.40E+03 | 6.23 | CTSO-3 | 2.60E+03 | 5.54E+01 | 2.49E+03 | 2.13 |
| CTSO-4 | 3.03E+03 | 2.44E+02 | 2.53E+03 | 6.53 | CTSO-4 | 2.71E+03 | 5.90E+01 | 2.63E+03 | 6.43 |
| CTSO-5 | 3.01E+03 | 1.41E+02 | 2.74E+03 | 6.60 | CTSO-5 | 2.71E+03 | 5.16E+01 | 2.60E+03 | 6.20 |
| CTSO-6 | 2.96E+03 | 1.78E+02 | 2.59E+03 | 5.73 | CTSO-6 | 2.74E+03 | 4.94E+01 | 2.64E+03 | 7.83 |
| CTSO-7 | 2.96E+03 | 1.84E+02 | 2.66E+03 | 5.53 | CTSO-7 | 2.72E+03 | 6.25E+01 | 2.61E+03 | 6.97 |
| CTSO-8 | 2.99E+03 | 1.60E+02 | 2.65E+03 | 6.17 | CTSO-8 | 2.71E+03 | 6.74E+01 | 2.60E+03 | 5.93 |
| CTSO-9 | 3.06E+03 | 2.49E+02 | 2.56E+03 | 6.67 | CTSO-9 | 2.60E+03 | 5.86E+01 | 2.51E+03 | 2.30 |
| CTSO-10 | 2.92E+03 | 2.16E+02 | 2.54E+03 | 4.80 | CTSO-10 | 2.72E+03 | 4.95E+01 | 2.61E+03 | 7.13 |
| Table 3-C | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Algorithm | AVG | STD | MIN | MR | Algorithm | AVG | STD | MIN | MR |
| f22 | f23 | ||||||||
| TSO | 9.47E+03 | 9.40E+02 | 6.59E+03 | 6.33 | TSO | 3.46E+03 | 1.44E+02 | 3.19E+03 | 5.80 |
| CTSO-1 | 9.66E+03 | 8.69E+02 | 6.58E+03 | 7.13 | CTSO-1 | 3.54E+03 | 1.60E+02 | 3.29E+03 | 7.43 |
| CTSO-2 | 9.86E+03 | 7.73E+02 | 7.16E+03 | 7.73 | CTSO-2 | 3.49E+03 | 1.85E+02 | 3.22E+03 | 6.07 |
| CTSO-3 | 8.50E+03 | 1.45E+03 | 5.29E+03 | 3.93 | CTSO-3 | 3.36E+03 | 1.62E+02 | 3.01E+03 | 3.83 |
| CTSO-4 | 9.36E+03 | 9.72E+02 | 6.94E+03 | 6.20 | CTSO-4 | 3.49E+03 | 1.93E+02 | 3.05E+03 | 6.20 |
| CTSO-5 | 9.34E+03 | 9.78E+02 | 6.16E+03 | 5.77 | CTSO-5 | 3.47E+03 | 1.95E+02 | 3.16E+03 | 5.47 |
| CTSO-6 | 9.52E+03 | 8.58E+02 | 7.13E+03 | 6.57 | CTSO-6 | 3.53E+03 | 1.80E+02 | 3.28E+03 | 6.87 |
| CTSO-7 | 9.56E+03 | 6.84E+02 | 7.67E+03 | 6.57 | CTSO-7 | 3.52E+03 | 1.73E+02 | 3.20E+03 | 7.03 |
| CTSO-8 | 9.50E+03 | 1.12E+03 | 6.35E+03 | 6.47 | CTSO-8 | 3.55E+03 | 2.67E+02 | 3.21E+03 | 6.77 |
| CTSO-9 | 8.06E+03 | 1.86E+03 | 2.84E+03 | 3.03 | CTSO-9 | 3.36E+03 | 1.61E+02 | 2.98E+03 | 4.10 |
| CTSO-10 | 9.58E+03 | 5.84E+02 | 8.57E+03 | 6.27 | CTSO-10 | 3.48E+03 | 1.47E+02 | 3.18E+03 | 6.43 |
| f24 | f25 | ||||||||
| TSO | 3.71E+03 | 2.08E+02 | 3.37E+03 | 6.80 | TSO | 4.68E+03 | 4.06E+02 | 3.79E+03 | 8.03 |
| CTSO-1 | 3.63E+03 | 1.90E+02 | 3.31E+03 | 5.30 | CTSO-1 | 4.48E+03 | 4.97E+02 | 3.56E+03 | 6.23 |
| CTSO-2 | 3.75E+03 | 2.98E+02 | 3.36E+03 | 6.70 | CTSO-2 | 4.50E+03 | 3.61E+02 | 3.72E+03 | 6.60 |
| CTSO-3 | 3.53E+03 | 2.47E+02 | 3.04E+03 | 4.33 | CTSO-3 | 3.02E+03 | 4.51E+01 | 2.93E+03 | 1.57 |
| CTSO-4 | 3.72E+03 | 2.39E+02 | 3.38E+03 | 6.40 | CTSO-4 | 4.58E+03 | 4.62E+02 | 3.87E+03 | 7.27 |
| CTSO-5 | 3.76E+03 | 2.26E+02 | 3.31E+03 | 7.17 | CTSO-5 | 4.59E+03 | 3.97E+02 | 3.82E+03 | 7.50 |
| CTSO-6 | 3.74E+03 | 2.66E+02 | 3.35E+03 | 6.60 | CTSO-6 | 4.65E+03 | 4.67E+02 | 3.79E+03 | 7.43 |
| CTSO-7 | 3.72E+03 | 3.32E+02 | 3.38E+03 | 5.93 | CTSO-7 | 4.54E+03 | 4.32E+02 | 3.64E+03 | 6.70 |
| CTSO-8 | 3.76E+03 | 3.23E+02 | 3.42E+03 | 6.50 | CTSO-8 | 4.54E+03 | 3.53E+02 | 4.00E+03 | 7.17 |
| CTSO-9 | 3.50E+03 | 1.88E+02 | 3.21E+03 | 3.43 | CTSO-9 | 3.01E+03 | 3.92E+01 | 2.93E+03 | 1.43 |
| CTSO-10 | 3.74E+03 | 2.92E+02 | 3.35E+03 | 6.83 | CTSO-10 | 4.45E+03 | 3.90E+02 | 3.79E+03 | 6.07 |
| f26 | f27 | ||||||||
| TSO | 1.13E+04 | 1.15E+03 | 8.76E+03 | 7.67 | TSO | 4.26E+03 | 4.63E+02 | 3.57E+03 | 7.30 |
| CTSO-1 | 1.10E+04 | 1.06E+03 | 8.23E+03 | 6.90 | CTSO-1 | 4.21E+03 | 4.56E+02 | 3.49E+03 | 6.40 |
| CTSO-2 | 1.13E+04 | 1.02E+03 | 9.57E+03 | 7.73 | CTSO-2 | 4.12E+03 | 3.83E+02 | 3.56E+03 | 6.23 |
| CTSO-3 | 8.45E+03 | 1.44E+03 | 4.32E+03 | 1.90 | CTSO-3 | 3.55E+03 | 2.19E+02 | 3.23E+03 | 1.93 |
| CTSO-4 | 1.13E+04 | 1.18E+03 | 9.20E+03 | 7.50 | CTSO-4 | 4.16E+03 | 3.06E+02 | 3.45E+03 | 6.93 |
| CTSO-5 | 1.07E+04 | 1.22E+03 | 8.24E+03 | 6.00 | CTSO-5 | 4.18E+03 | 3.88E+02 | 3.45E+03 | 7.20 |
| CTSO-6 | 1.06E+04 | 9.86E+02 | 9.22E+03 | 5.80 | CTSO-6 | 4.13E+03 | 3.67E+02 | 3.64E+03 | 6.50 |
| CTSO-7 | 1.13E+04 | 1.34E+03 | 8.39E+03 | 7.60 | CTSO-7 | 4.09E+03 | 4.01E+02 | 3.58E+03 | 5.97 |
| CTSO-8 | 1.06E+04 | 1.25E+03 | 8.48E+03 | 5.63 | CTSO-8 | 4.26E+03 | 3.71E+02 | 3.55E+03 | 7.73 |
| CTSO-9 | 9.01E+03 | 1.50E+03 | 3.63E+03 | 2.77 | CTSO-9 | 3.66E+03 | 2.77E+02 | 3.28E+03 | 2.93 |
| CTSO-10 | 1.10E+04 | 1.37E+03 | 8.98E+03 | 6.50 | CTSO-10 | 4.23E+03 | 4.74E+02 | 3.61E+03 | 6.87 |
| f28 | f29 | ||||||||
| TSO | 6.95E+03 | 7.63E+02 | 5.11E+03 | 7.80 | TSO | 7.09E+03 | 1.32E+03 | 5.34E+03 | 7.30 |
| CTSO-1 | 6.78E+03 | 8.33E+02 | 5.49E+03 | 7.23 | CTSO-1 | 6.60E+03 | 1.07E+03 | 4.83E+03 | 5.93 |
| CTSO-2 | 6.52E+03 | 6.75E+02 | 5.35E+03 | 6.03 | CTSO-2 | 6.82E+03 | 1.39E+03 | 4.71E+03 | 6.57 |
| CTSO-3 | 3.36E+03 | 4.68E+01 | 3.28E+03 | 1.43 | CTSO-3 | 5.59E+03 | 6.93E+02 | 4.80E+03 | 3.00 |
| CTSO-4 | 6.59E+03 | 8.56E+02 | 5.32E+03 | 6.63 | CTSO-4 | 6.64E+03 | 1.65E+03 | 4.67E+03 | 5.53 |
| CTSO-5 | 6.71E+03 | 8.21E+02 | 5.50E+03 | 6.83 | CTSO-5 | 7.58E+03 | 3.68E+03 | 5.25E+03 | 6.73 |
| CTSO-6 | 6.59E+03 | 9.89E+02 | 4.39E+03 | 6.80 | CTSO-6 | 6.87E+03 | 1.25E+03 | 5.42E+03 | 6.70 |
| CTSO-7 | 6.78E+03 | 8.11E+02 | 5.23E+03 | 7.17 | CTSO-7 | 6.62E+03 | 1.13E+03 | 5.10E+03 | 6.27 |
| CTSO-8 | 6.74E+03 | 8.69E+02 | 5.12E+03 | 6.93 | CTSO-8 | 7.11E+03 | 1.40E+03 | 5.01E+03 | 7.27 |
| CTSO-9 | 3.38E+03 | 8.88E+01 | 3.26E+03 | 1.57 | CTSO-9 | 5.73E+03 | 8.07E+02 | 4.46E+03 | 3.53 |
| CTSO-10 | 6.90E+03 | 6.42E+02 | 5.73E+03 | 7.57 | CTSO-10 | 7.06E+03 | 1.55E+03 | 4.58E+03 | 7.17 |
| f30 | |||||||||
| Algorithm | AVG | STD | MIN | MR | |||||
| TSO | 8.51E+08 | 9.03E+08 | 1.91E+08 | 7.43 | |||||
| CTSO-1 | 6.09E+08 | 5.87E+08 | 7.08E+07 | 6.37 | |||||
| CTSO-2 | 5.23E+08 | 5.57E+08 | 8.79E+07 | 5.87 | |||||
| CTSO-3 | 1.87E+06 | 2.13E+06 | 5.87E+04 | 1.50 | |||||
| CTSO-4 | 6.15E+08 | 5.41E+08 | 3.57E+07 | 6.57 | |||||
| CTSO-5 | 7.89E+08 | 5.65E+08 | 4.65E+07 | 7.57 | |||||
| CTSO-6 | 8.63E+08 | 7.59E+08 | 1.21E+08 | 7.20 | |||||
| CTSO-7 | 8.42E+08 | 7.37E+08 | 8.26E+07 | 7.43 | |||||
| CTSO-8 | 9.36E+08 | 7.41E+08 | 1.48E+08 | 7.93 | |||||
| CTSO-9 | 3.02E+06 | 6.92E+06 | 3.88E+04 | 1.50 | |||||
| CTSO-10 | 6.63E+08 | 5.55E+08 | 8.49E+07 | 6.63 | |||||
| TSO | CTSO-1 | CTSO-2 | CTSO-3 | CTSO-4 | CTSO-5 | CTSO-6 | CTSO-7 | CTSO-8 | CTSO-9 | CTSO-10 |
|---|---|---|---|---|---|---|---|---|---|---|
| 6.87 | 6.66 | 6.57 | 2.66 | 6.68 | 6.59 | 6.83 | 6.62 | 7.00 | 2.85 | 6.68 |
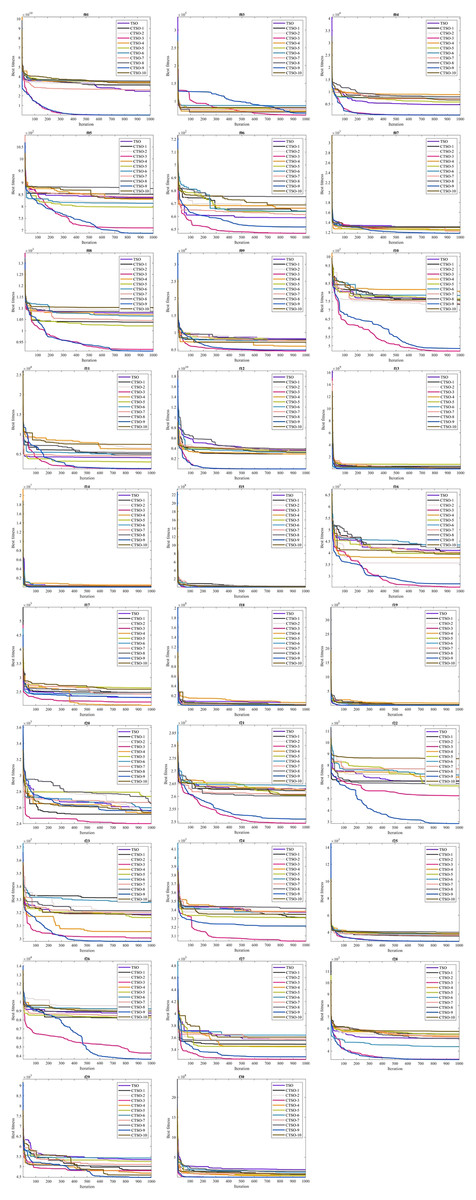
Figure 3: Convergence curve graph of CEC’17 test functions.
{kind=link}
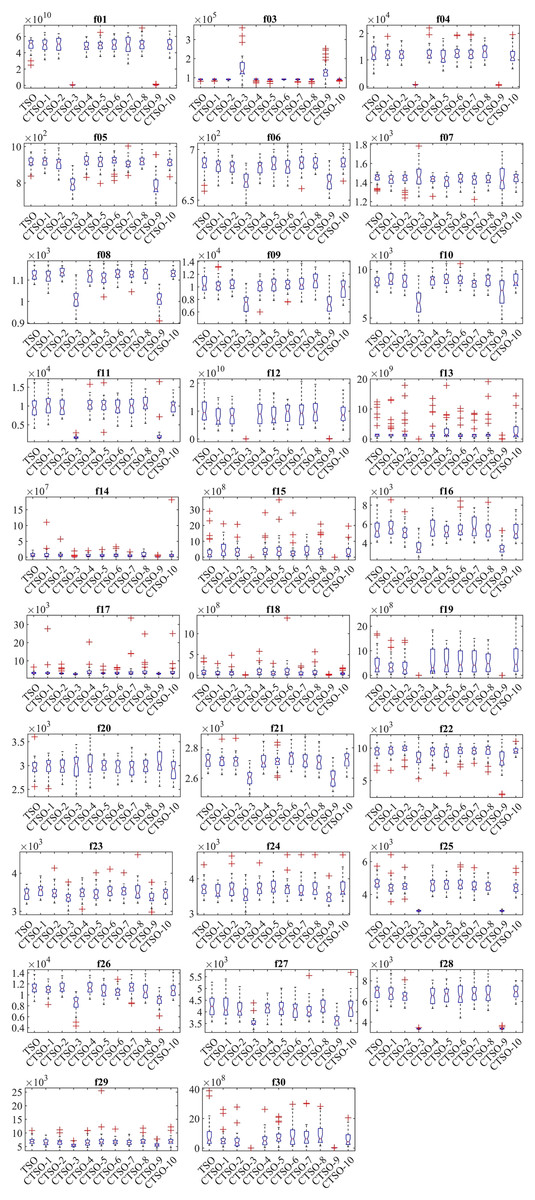
Figure 4: Boxplot of CEC’17 test functions.
{kind=link}
The results of the fitness functions obtained using the Wilcoxon rank-sum test are given in Table 5. The results obtained were obtained at a significance level of five percent. The results obtained must be less than 0.05 to show a significant advantage. The △, ▽, and ≈ signs in the table indicate the superiority of one of the proposed CTSOs, the TSO is superior, and there is no significant difference between the methods, respectively. When the Table 5 is examined, it is seen that CTSO-3 and CTSO-9 show the best performances by providing superiority to TSO in 26 functions. It can be said that Gaussian and sinusoidal chaotic maps are superior to other chaotic maps and standard TSO in benchmark functions.
| CTSO-1 | CTSO-2 | CTSO-3 | CTSO-4 | CTSO-5 | CTSO-6 | CTSO-7 | CTSO-8 | CTSO-9 | CTSO-10 | |
|---|---|---|---|---|---|---|---|---|---|---|
| f1 | 8.53E−01 | 8.65E−01 | 3.02E−11 | 1.91E−01 | 5.89E−01 | 7.96E−01 | 9.71E−01 | 7.28E−01 | 3.02E−11 | 7.06E−01 |
| ≈ | ≈ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | ≈ | |
| f3 | 9.82E−01 | 5.30E−01 | 1.86E−06 | 2.97E−01 | 6.00E−01 | 4.83E−01 | 6.20E−01 | 5.20E−01 | 4.74E−06 | 9.00E−01 |
| ≈ | ≈ | ∇ | ≈ | ≈ | ≈ | ≈ | ≈ | ∇ | ≈ | |
| f4 | 5.69E−01 | 6.84E−01 | 3.02E−11 | 9.00E−01 | 1.62E−01 | 9.47E−01 | 1.00E+00 | 3.40E−01 | 3.02E−11 | 3.04E−01 |
| ≈ | ≈ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | ≈ | |
| f5 | 4.55E−01 | 6.00E−01 | 1.96E−10 | 4.92E−01 | 9.23E−01 | 2.64E−01 | 1.81E−01 | 4.83E−01 | 6.72E−10 | 6.00E−01 |
| ≈ | ≈ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | ≈ | |
| f6 | 3.48E−01 | 9.93E−02 | 6.53E−08 | 1.41E−01 | 9.71E−01 | 3.04E−01 | 4.29E−01 | 9.00E−01 | 1.39E−06 | 8.19E−01 |
| ≈ | ≈ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | ≈ | |
| f7 | 2.64E−01 | 5.40E−01 | 5.01E−01 | 1.09E−01 | 3.03E−02 | 6.10E−01 | 7.01E−02 | 2.97E−01 | 3.40E−01 | 8.53E−01 |
| ≈ | ≈ | ≈ | ≈ | Δ | ≈ | Δ | ≈ | ≈ | ≈ | |
| f8 | 5.30E−01 | 1.15E−01 | 2.37E−10 | 5.20E−01 | 5.55E−02 | 5.59E−01 | 5.40E−01 | 3.95E−01 | 3.34E−11 | 1.81E−01 |
| ≈ | ≈ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | ≈ | |
| f9 | 8.07E−01 | 8.88E−01 | 2.67E−09 | 6.73E−01 | 6.31E−01 | 8.30E−01 | 1.00E+00 | 3.33E−01 | 3.65E−08 | 1.76E−01 |
| ≈ | ≈ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | ≈ | |
| f10 | 2.28E−01 | 5.30E−01 | 4.44E−07 | 3.33E−01 | 5.37E−02 | 1.12E−01 | 2.71E−01 | 1.54E−01 | 6.67E−03 | 5.30E−01 |
| ≈ | ≈ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | ||
| f11 | 2.90E−01 | 9.23E−01 | 3.02E−11 | 2.12E−01 | 3.11E−01 | 9.94E−01 | 6.20E−01 | 2.71E−01 | 8.10E−10 | 4.73E−01 |
| ≈ | ≈ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | ≈ | |
| f12 | 2.07E−02 | 1.37E−01 | 3.02E−11 | 2.40E−01 | 1.12E−01 | 5.30E−01 | 5.20E−01 | 9.23E−01 | 3.02E−11 | 3.79E−01 |
| Δ | ≈ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | ≈ | |
| f13 | 7.28E−01 | 8.30E−01 | 3.02E−11 | 5.11E−01 | 4.12E−01 | 1.91E−01 | 5.59E−01 | 8.65E−01 | 1.21E−10 | 5.01E−01 |
| ≈ | ≈ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | ≈ | |
| f14 | 3.71E−01 | 6.95E−01 | 1.60E−07 | 2.71E−01 | 6.00E−01 | 9.23E−01 | 1.67E−01 | 7.06E−01 | 2.02E−08 | 6.84E−01 |
| ≈ | ≈ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | ≈ | |
| f15 | 6.35E−02 | 1.19E−01 | 3.02E−11 | 1.41E−01 | 6.57E−02 | 5.49E−01 | 1.22E−01 | 3.15E−02 | 3.02E−11 | 3.87E−01 |
| ≈ | ≈ | Δ | ≈ | ≈ | ≈ | ≈ | Δ | Δ | ≈ | |
| f16 | 3.71E−01 | 2.97E−01 | 3.20E−09 | 8.30E−01 | 2.40E−01 | 9.82E−01 | 4.38E−01 | 7.06E−01 | 6.72E−10 | 3.48E−01 |
| ≈ | ≈ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | ≈ | |
| f17 | 5.59E−01 | 7.01E−02 | 2.15E−06 | 6.31E−01 | 3.79E−01 | 8.65E−01 | 6.10E−01 | 3.79E−01 | 1.17E−03 | 7.28E−01 |
| ≈ | ≈ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | ≈ | |
| f18 | 1.71E−01 | 5.40E−01 | 5.49E−11 | 7.73E−01 | 1.19E−01 | 9.59E−01 | 6.79E−02 | 6.10E−01 | 1.33E−10 | 1.22E−01 |
| ≈ | ≈ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | ≈ | |
| f19 | 7.28E−01 | 2.64E−01 | 3.02E−11 | 4.20E−01 | 5.59E−01 | 4.46E−01 | 9.94E−01 | 4.92E−01 | 3.02E−11 | 3.79E−01 |
| ≈ | ≈ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | ≈ | |
| f20 | 4.83E−01 | 7.17E−01 | 3.04E−01 | 3.33E−01 | 1.58E−01 | 6.20E−01 | 9.00E−01 | 5.01E−01 | 9.05E−02 | 5.89E−01 |
| ≈ | ≈ | ≈ | ≈ | ≈ | ≈ | ≈ | ≈ | ≈ | ≈ | |
| f21 | 9.94E−01 | 5.11E−01 | 3.82E−09 | 4.29E−01 | 3.11E−01 | 1.58E−01 | 7.39E−01 | 2.46E−01 | 3.20E−09 | 9.59E−01 |
| ≈ | ≈ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | ≈ | |
| f22 | 3.71E−01 | 6.35E−02 | 2.38E−03 | 6.84E−01 | 5.79E−01 | 7.73E−01 | 8.88E−01 | 6.31E−01 | 3.77E−04 | 9.23E−01 |
| ≈ | ≈ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | ≈ | |
| f23 | 4.84E−02 | 6.95E−01 | 1.44E−02 | 7.62E−01 | 8.53E−01 | 1.12E−01 | 1.58E−01 | 2.58E−01 | 1.63E−02 | 5.30E−01 |
| Δ | ≈ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | ≈ | |
| f24 | 1.49E−01 | 7.84E−01 | 4.23E−03 | 7.73E−01 | 2.90E−01 | 6.10E−01 | 3.18E−01 | 8.65E−01 | 5.97E−05 | 9.82E−01 |
| ≈ | ≈ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | ≈ | |
| f25 | 1.08E−02 | 4.36E−02 | 3.02E−11 | 3.40E−01 | 5.69E−01 | 4.12E−01 | 1.30E−01 | 1.19E−01 | 3.02E−11 | 9.07E−03 |
| Δ | Δ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | Δ | |
| f26 | 4.12E−01 | 1.00E+00 | 6.72E−10 | 9.59E−01 | 6.79E−02 | 1.38E−02 | 7.39E−01 | 3.39E−02 | 3.08E−08 | 2.06E−01 |
| ≈ | ≈ | Δ | ≈ | ≈ | Δ | ≈ | Δ | Δ | ≈ | |
| f27 | 6.84E−01 | 2.23E−01 | 1.55E−09 | 6.00E−01 | 5.49E−01 | 3.63E−01 | 9.63E−02 | 8.88E−01 | 6.05E−07 | 6.41E−01 |
| ≈ | ≈ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | ≈ | |
| f28 | 3.11E−01 | 3.03E−02 | 3.02E−11 | 9.93E−02 | 1.91E−01 | 1.81E−01 | 3.95E−01 | 2.46E−01 | 3.02E−11 | 7.51E−01 |
| ≈ | Δ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | ≈ | |
| f29 | 1.96E−01 | 2.97E−01 | 6.53E−07 | 7.24E−02 | 6.95E−01 | 5.11E−01 | 1.26E−01 | 8.77E−01 | 5.86E−06 | 9.12E−01 |
| ≈ | ≈ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | ≈ | |
| f30 | 2.46E−01 | 3.39E−02 | 3.02E−11 | 2.90E−01 | 5.01E−01 | 9.59E−01 | 7.51E−01 | 3.18E−01 | 3.02E−11 | 4.64E−01 |
| ≈ | Δ | Δ | ≈ | ≈ | ≈ | ≈ | ≈ | Δ | ≈ | |
| (Δ/∇/≈) | 3/0/26 | 3/0/26 | 26/1/2 | 0/0/29 | 1/0/28 | 1/0/28 | 0/0/29 | 2/0/27 | 26/1/2 | 1/0/28 |
Real-world engineering problems
In this section, five real-world engineering design problems are used to validate the search performance of each implemented algorithm. These problems are the speed reducer problem, tension compression spring design problem, welded beam design problem, pressure vessel, and three-bar truss design problem. All these problems are limited in nature, and therefore an external penalty approach mechanism was used to solve the design constraints. The maximum number of iterations for all problems was determined to be 1,000 and the population number was 30. The algorithm parameters are the values used in CEC’17. To visualize and compare the convergence behavior of the examined algorithms, the best fitness values obtained for each problem, which are usually called convergence curves, are drawn. All experiments corresponding to each algorithm were run independently 30 times. The best, mean, worst, and standard deviation values were examined comparatively, and the best solution obtained among the algorithms was highlighted in bold for ease of readability.
Speed reducer problem
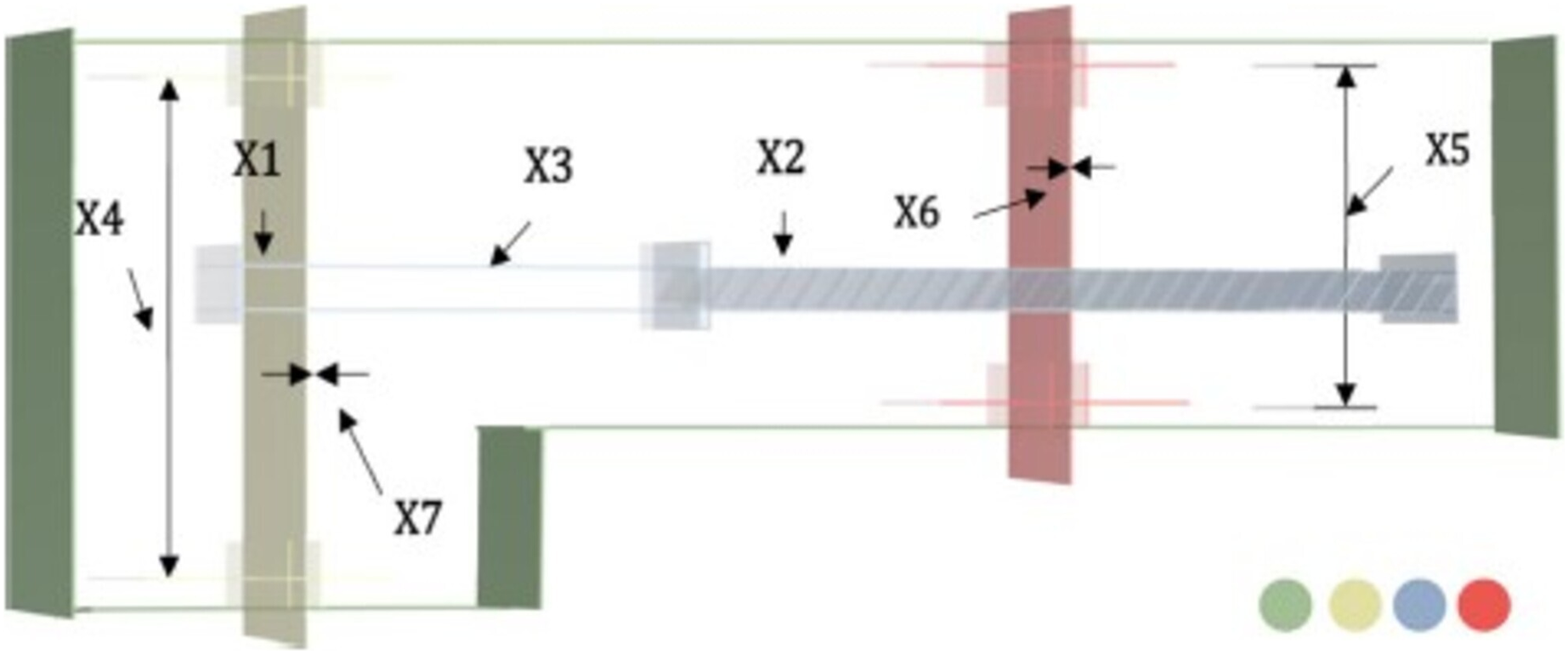
This is essentially a gearbox issue, allowing the aircraft engine to spin at its most efficient speed (Dhiman, 2021). Finding the face width , the tooth modulus ( ), the number of teeth on the pinion ( ), the length of the first shaft between the bearings , the length of the second shaft between the bearings , the diameter of the first shaft , and the diameter of the second shaft will allow you to determine the minimum values of the seven decision variables in this problem. Figure 5 shows a schematic illustration of the speed reducer concept. The goal of this design challenge is to determine the speed reducer’s lightest possible cost. The mathematical representation of this problem is as in the Appendix 1.
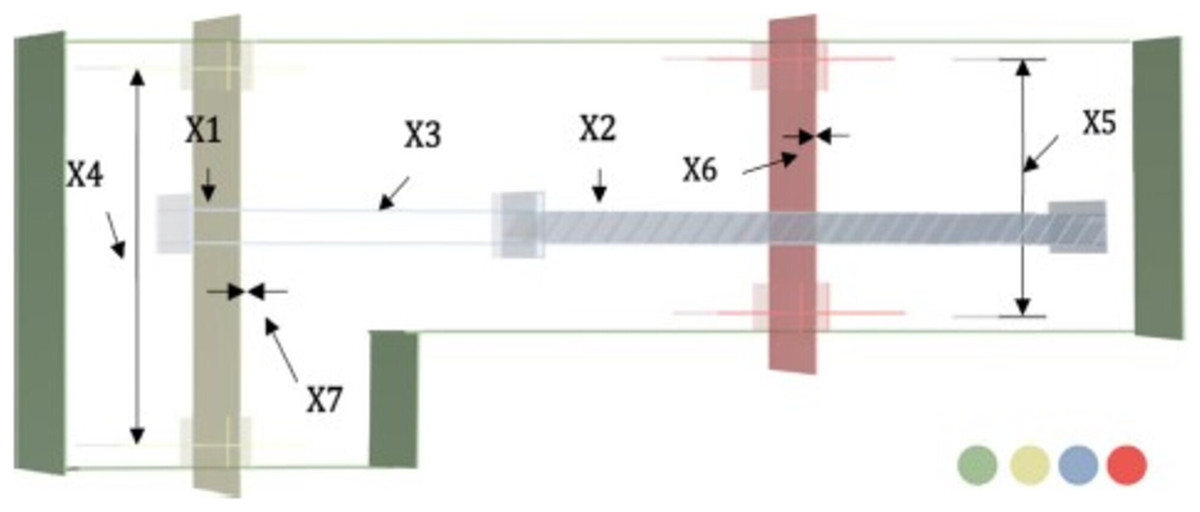
Figure 5: Speed reducer problem.
{kind=link}
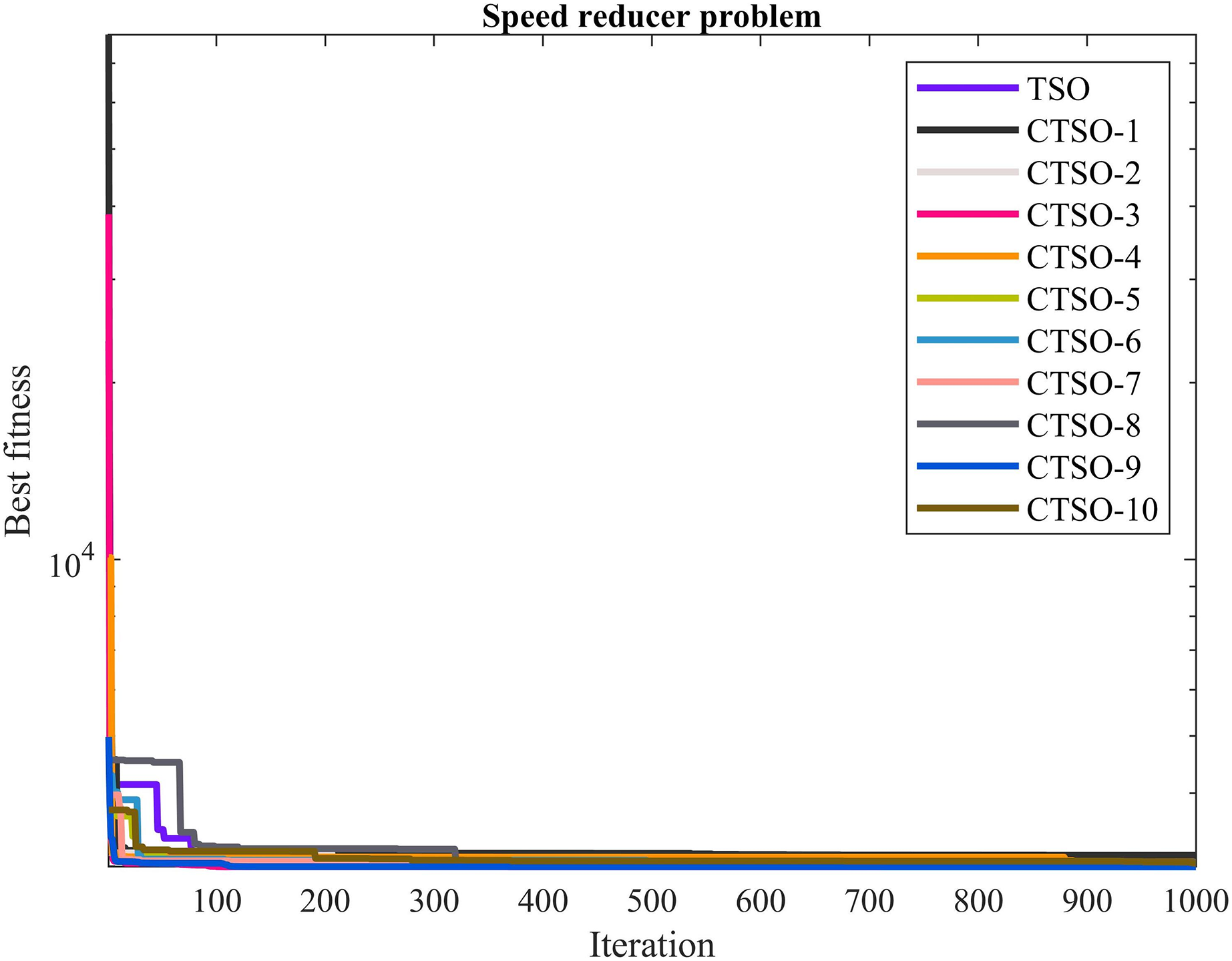
The comparative values of the performances of the 10 proposed CTSO methods and standard TSO methods on the speed reducer problem are presented in Table 6. The best, average, worst, and standard deviation values of the methods used are shown in Table 6. In addition, the decision variables depending on the best value of the methods used in the results of 30 runs on this problem are given in Table 7. When Table 6 is examined, it is seen that CTSO-3 and CTSO-9 are superior to other methods on the basis of the best value, and CTSO-9 is more successful when analyzed on the basis of mean value. In addition, the convergence graph of the methods used on the speed reducer problem is shown in Fig. 6.
| Algorithm | Best | Mean | Worst | SD |
|---|---|---|---|---|
| TSO | 3,043.966 | 338,765.8 | 2,180,277 | 634,222.4 |
| CTSO1 | 3,133.385 | 209,405.2 | 1,769,248 | 470,918.1 |
| CTSO2 | 3,008.135 | 643,475.8 | 2,297,437 | 856,143.2 |
| CTSO3 | 2,994.423 | 3,805.273 | 5,521.033 | 872.899 |
| CTSO4 | 3,050.252 | 422,165.5 | 2,001,481 | 630,221.1 |
| CTSO5 | 3,003.839 | 135,976.5 | 1,034,844 | 289,203.5 |
| CTSO6 | 3,015.958 | 231,801 | 2,363,101 | 636,178.5 |
| CTSO7 | 3,014.59 | 210,227.5 | 1,625,269 | 455,196.1 |
| CTSO8 | 3,050.025 | 594,289.3 | 2,401,982 | 850,915.1 |
| CTSO9 | 2,994.423 | 3,627.353 | 4,774.773 | 562.9862 |
| CTSO10 | 3,036.987 | 358,518.4 | 2,078,853 | 620,159.3 |
| Algorithm | Parameters values | fmin | ||||||
|---|---|---|---|---|---|---|---|---|
| x1 | x2 | x3 | x4 | x5 | x 6 | x 7 | ||
| TSO | 3.501019 | 0.7 | 17 | 7.3 | 7.917685 | 3.367619 | 5.349237 | 3,043.966 |
| CTSO1 | 3.499917 | 0.7 | 17 | 7.994088 | 7.911673 | 3.787018 | 5.28737 | 3,133.385 |
| CTSO2 | 3.504471 | 0.7 | 17 | 7.99709 | 7.857388 | 3.35903 | 5.287425 | 3,008.135 |
| CTSO3 | 3.49999 | 0.7 | 17 | 7.3 | 7.715319 | 3.350541 | 5.286655 | 2,994.423 |
| CTSO4 | 3.499871 | 0.7 | 17 | 8.067661 | 8.067661 | 3.361258 | 5.345938 | 3,050.252 |
| CTSO5 | 3.499944 | 0.7 | 17 | 8.006041 | 7.768105 | 3.353007 | 5.288778 | 3,003.839 |
| CTSO6 | 3.500284 | 0.7 | 17 | 8.048994 | 8.074678 | 3.35588 | 5.29533 | 3,015.958 |
| CTSO7 | 3.509419 | 0.7 | 17 | 7.630128 | 8.036515 | 3.373788 | 5.28744 | 3,014.590 |
| CTSO8 | 3.499876 | 0.7 | 17 | 8.014485 | 7.877796 | 3.352811 | 5.356255 | 3,050.025 |
| CTSO9 | 3.49999 | 0.7 | 17 | 7.3 | 7.715319 | 3.350541 | 5.286654 | 2,994.423 |
| CTSO10 | 3.500698 | 0.7 | 17 | 7.3 | 8.072679 | 3.361987 | 5.335593 | 3,036.987 |
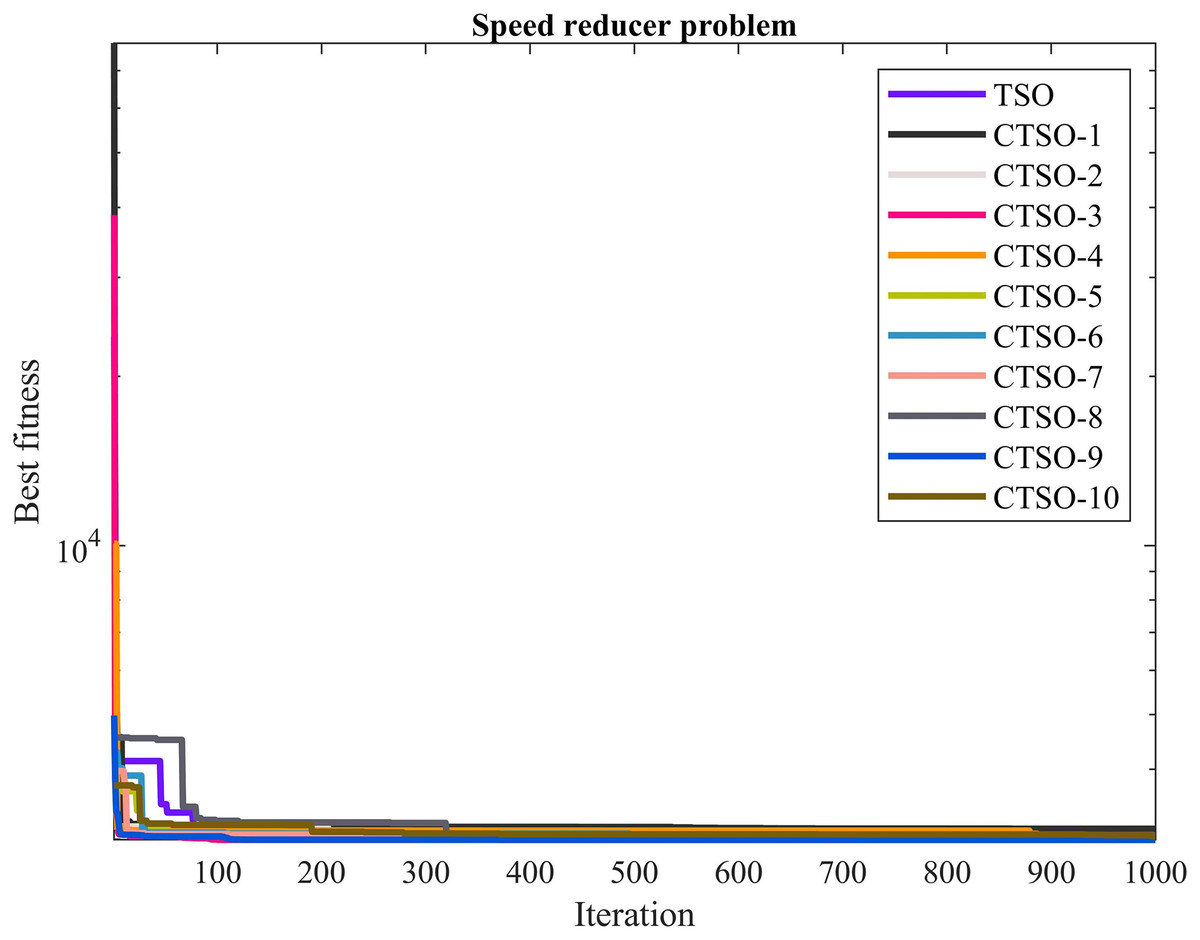
Figure 6: The convergence graph of the methods used on the speed reducer problem.
{kind=link}
Tension compression spring design problem
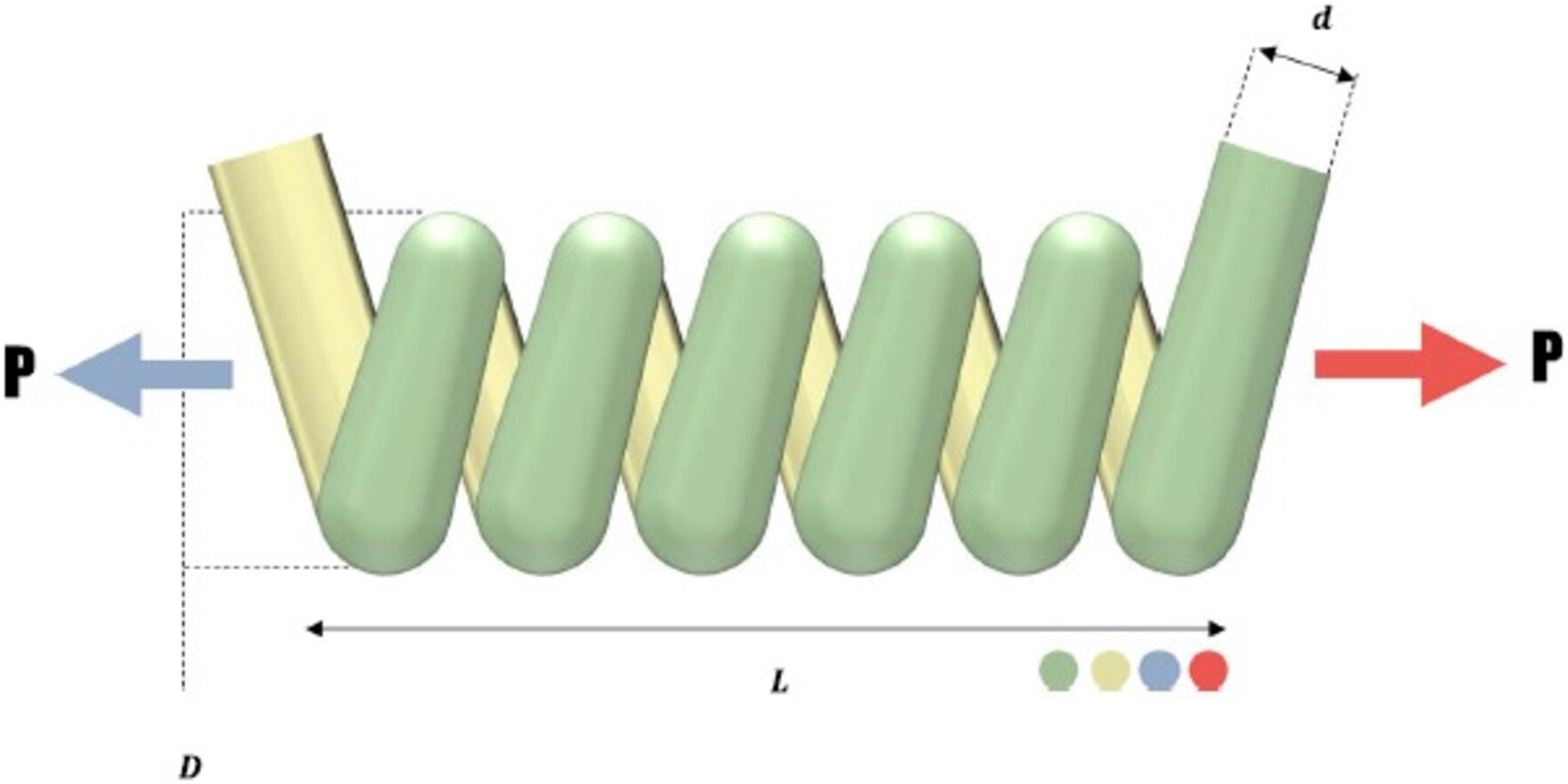
The goal of the tension/compression spring design issue, as outlined by Arora (Arora, 2004), is to provide a spring design with the least amount of weight possible. Figure 7’s schematic illustration of this minimization issue shows some of its restrictions, including the cut-off voltage, ripple frequency, and minimal deviation. There are three choice variables in the tension/compression spring dilemma. These are the following: the wire diameter ( ), the average coil diameter ( ), and the number of active coils ( ). The mathematical representation of this problem is as in the Appendix 2.
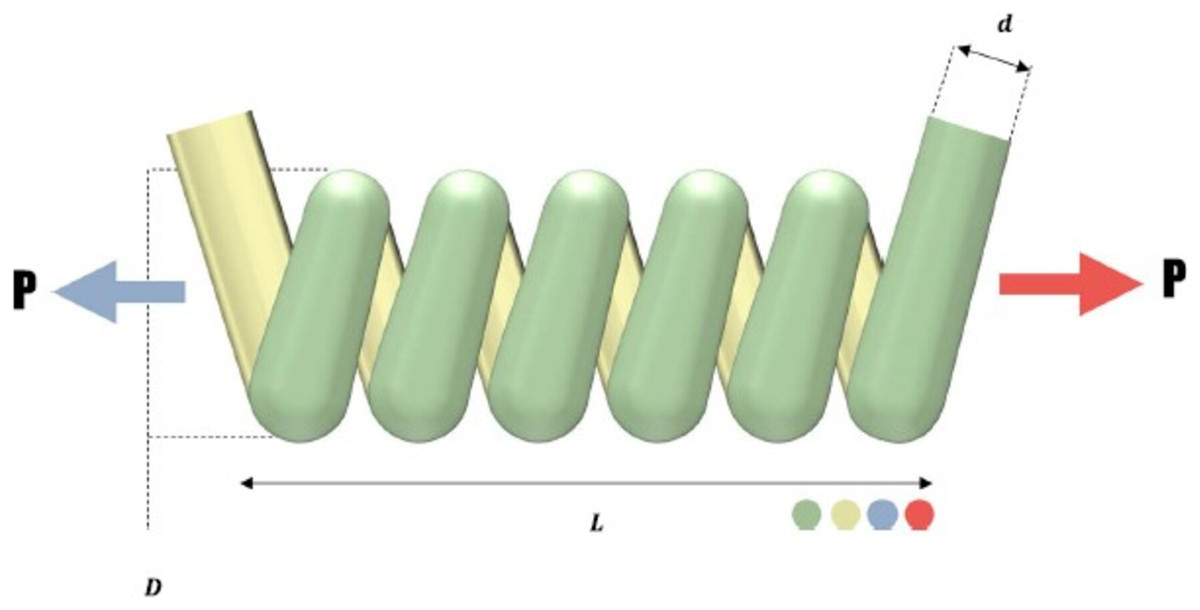
Figure 7: Tension compression spring design problem.
{kind=link}
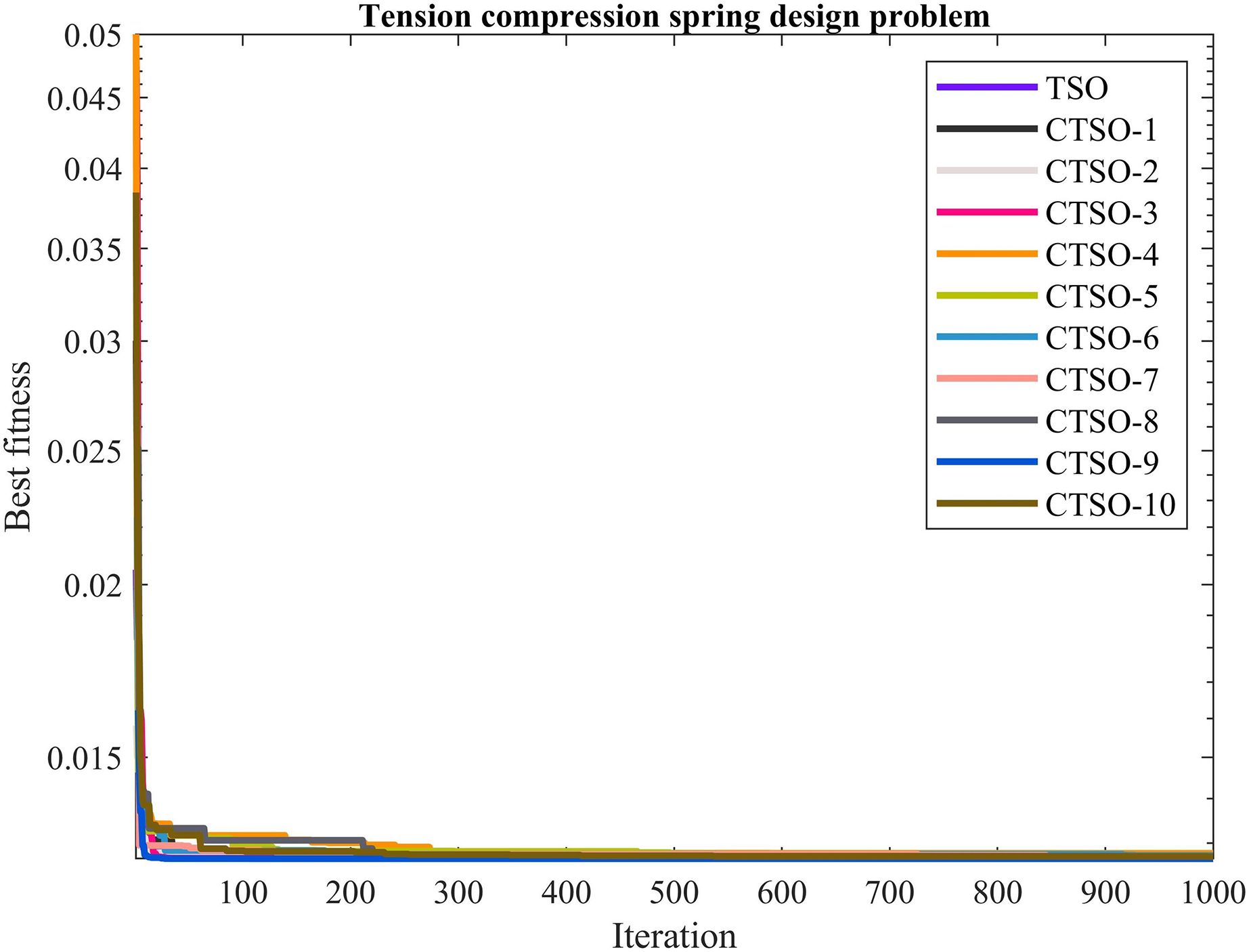
The comparative values of the performances of the 10 proposed CTSO methods and standard TSO methods on the tension compression spring design problem are presented in Table 8. The best, average, worst, and standard deviation values of the methods used are shown in Table 8. In addition, the decision variables depending on the best value of the methods used in the results of 30 runs on this problem are given in Table 9. When Table 8 is examined, it is seen that CTSO-9 is superior to other methods on the basis of the best value, and CTSO-6 is more successful when analyzed on the basis of mean value. In addition, the convergence graph of the methods used on the tension compression spring design problem is shown in Fig. 8.
| Algorithm | Best | Mean | Worst | SD |
|---|---|---|---|---|
| TSO | 0.012673 | 0.013698 | 0.017631 | 0.001075 |
| CTSO1 | 0.012715 | 0.013655 | 0.017233 | 0.00081 |
| CTSO2 | 0.012702 | 0.013486 | 0.016016 | 0.000722 |
| CTSO3 | 0.01268 | 0.014229 | 0.020937 | 0.001895 |
| CTSO4 | 0.012784 | 0.013732 | 0.016824 | 0.000896 |
| CTSO5 | 0.012714 | 0.013537 | 0.015575 | 0.000668 |
| CTSO6 | 0.012739 | 0.013413 | 0.015612 | 0.000617 |
| CTSO7 | 0.01268 | 0.013579 | 0.015701 | 0.000774 |
| CTSO8 | 0.012683 | 0.013597 | 0.017302 | 0.000961 |
| CTSO9 | 0.012670 | 0.013483 | 0.017367 | 0.001136 |
| CTSO10 | 0.012714 | 0.013481 | 0.015773 | 0.000701 |
| Algorithm | Parameters values | fmin | ||
|---|---|---|---|---|
| TSO | 0.05215 | 0.367888 | 10.66628 | 0.012673 |
| CTSO1 | 0.053121 | 0.391907 | 9.497097 | 0.012715 |
| CTSO2 | 0.050521 | 0.329228 | 13.11549 | 0.012702 |
| CTSO3 | 0.050809 | 0.335913 | 12.62168 | 0.01268 |
| CTSO4 | 0.054124 | 0.418139 | 8.436915 | 0.012784 |
| CTSO5 | 0.050561 | 0.330017 | 13.0706 | 0.012714 |
| CTSO6 | 0.053384 | 0.398798 | 9.208447 | 0.012739 |
| CTSO7 | 0.052278 | 0.370952 | 10.50679 | 0.01268 |
| CTSO8 | 0.05217 | 0.368334 | 10.65104 | 0.012683 |
| CTSO9 | 0.05119 | 0.344834 | 12.02127 | 0.012670 |
| CTSO10 | 0.053257 | 0.395514 | 9.333766 | 0.012714 |
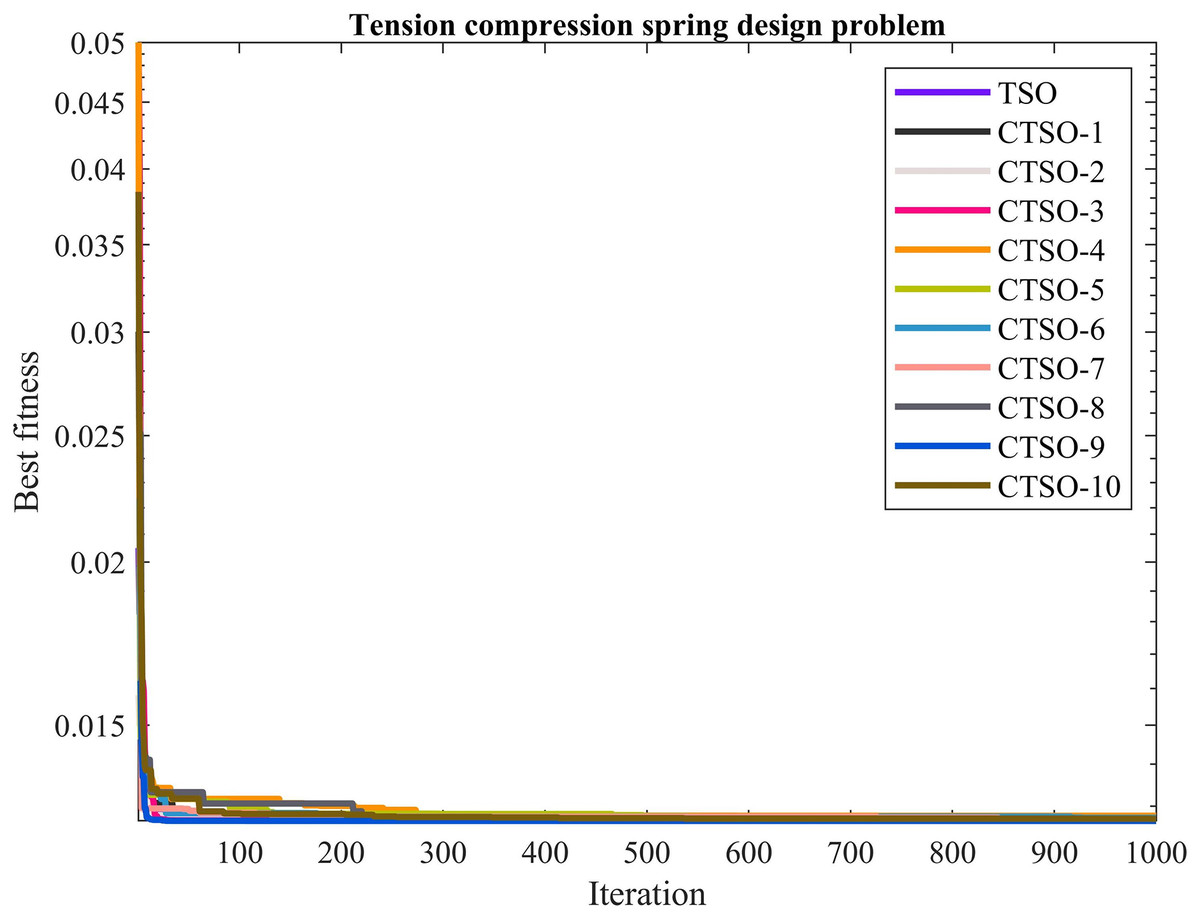
Figure 8: The convergence graph of the methods used on the tension compression spring design problem.
{kind=link}
Welded beam design problem
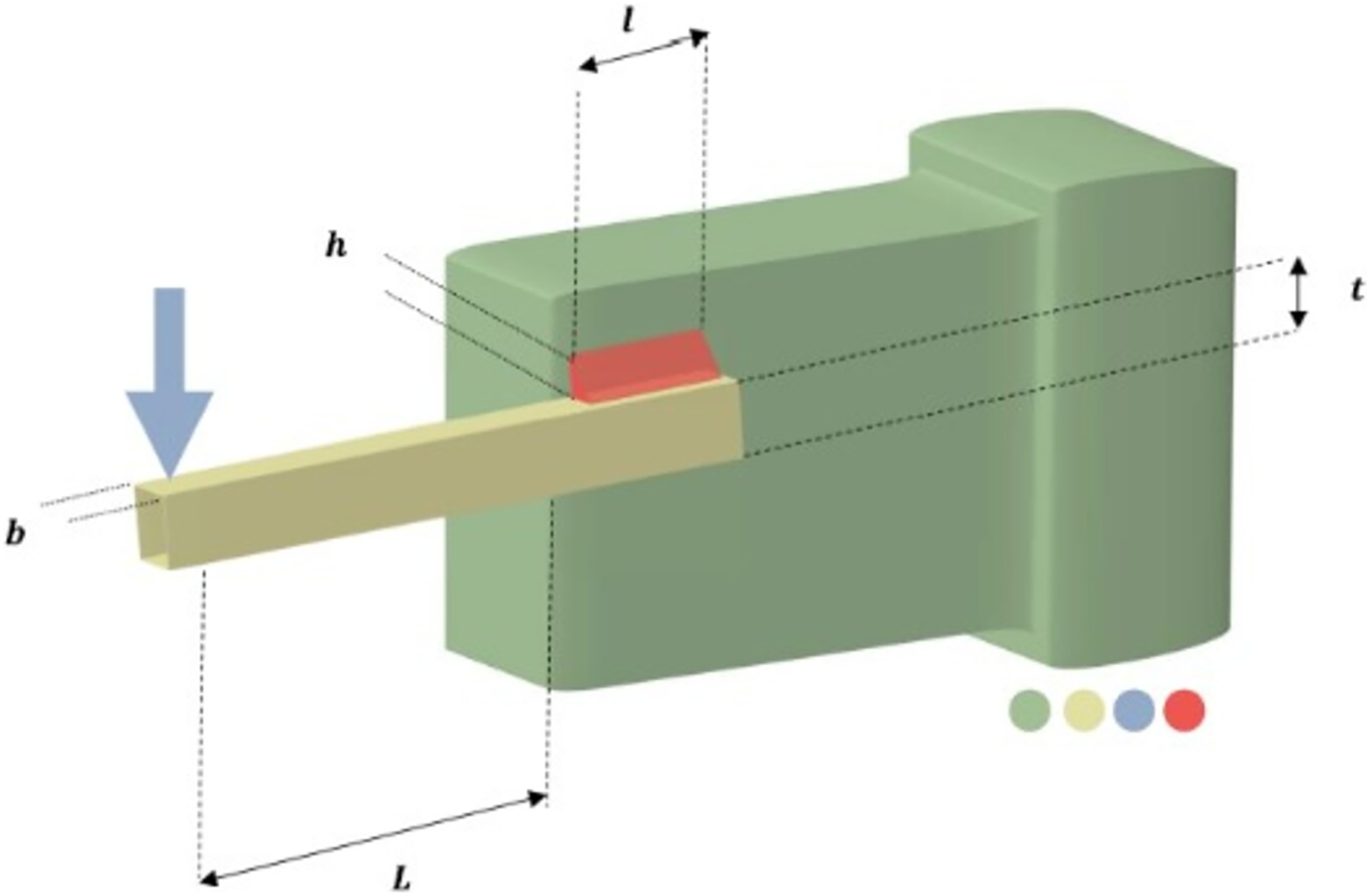
The primary goal of the welded beam design challenge is to create a beam for the least amount of money while adhering to specific constraints (Varol Altay & Alatas, 2020). Figure 9 depicts a welded beam construction made up of beam A and the welding process needed to join it to item B. Five nonlinear inequality constraints and four choice variables make up the issue. The weld thickness, weld joint length, element width, and element thickness are represented by the design parameters ( ), ( ), ( ), and ( ), respectively. The mathematical representation of this problem is as in the Appendix 3.
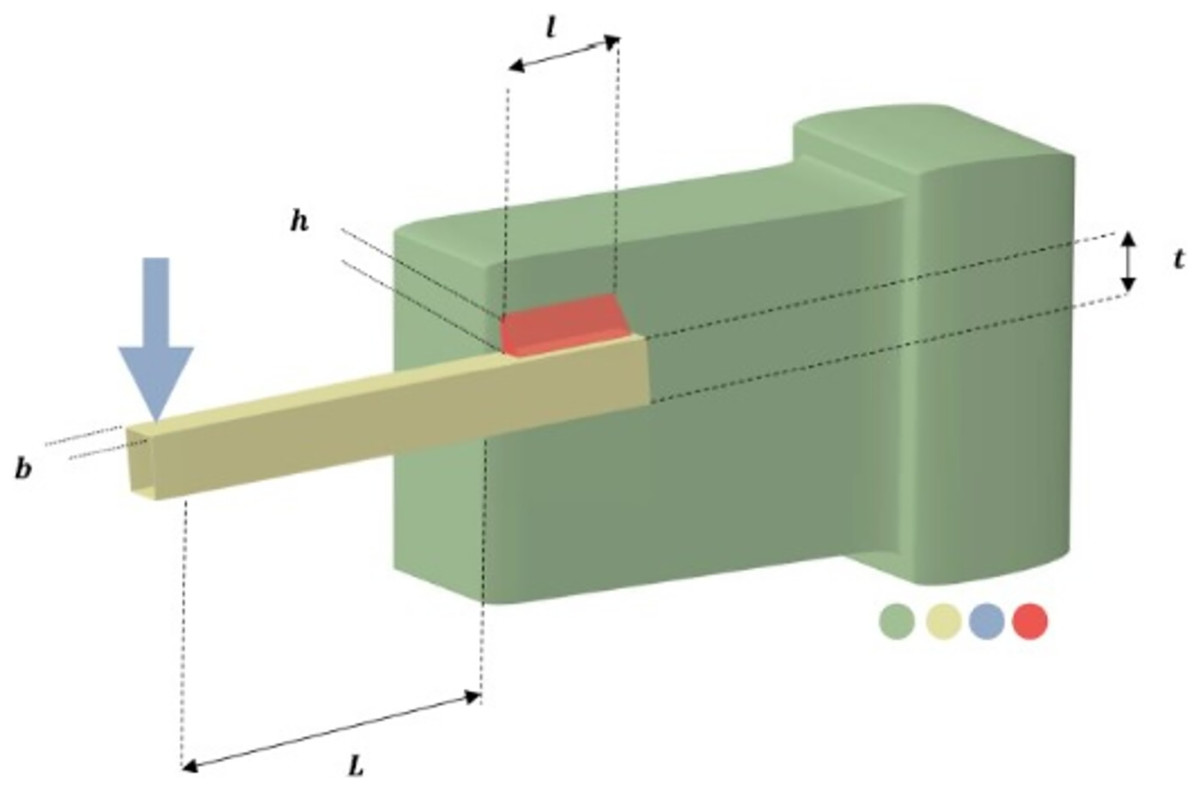
Figure 9: Welded beam design problem.
{kind=link}
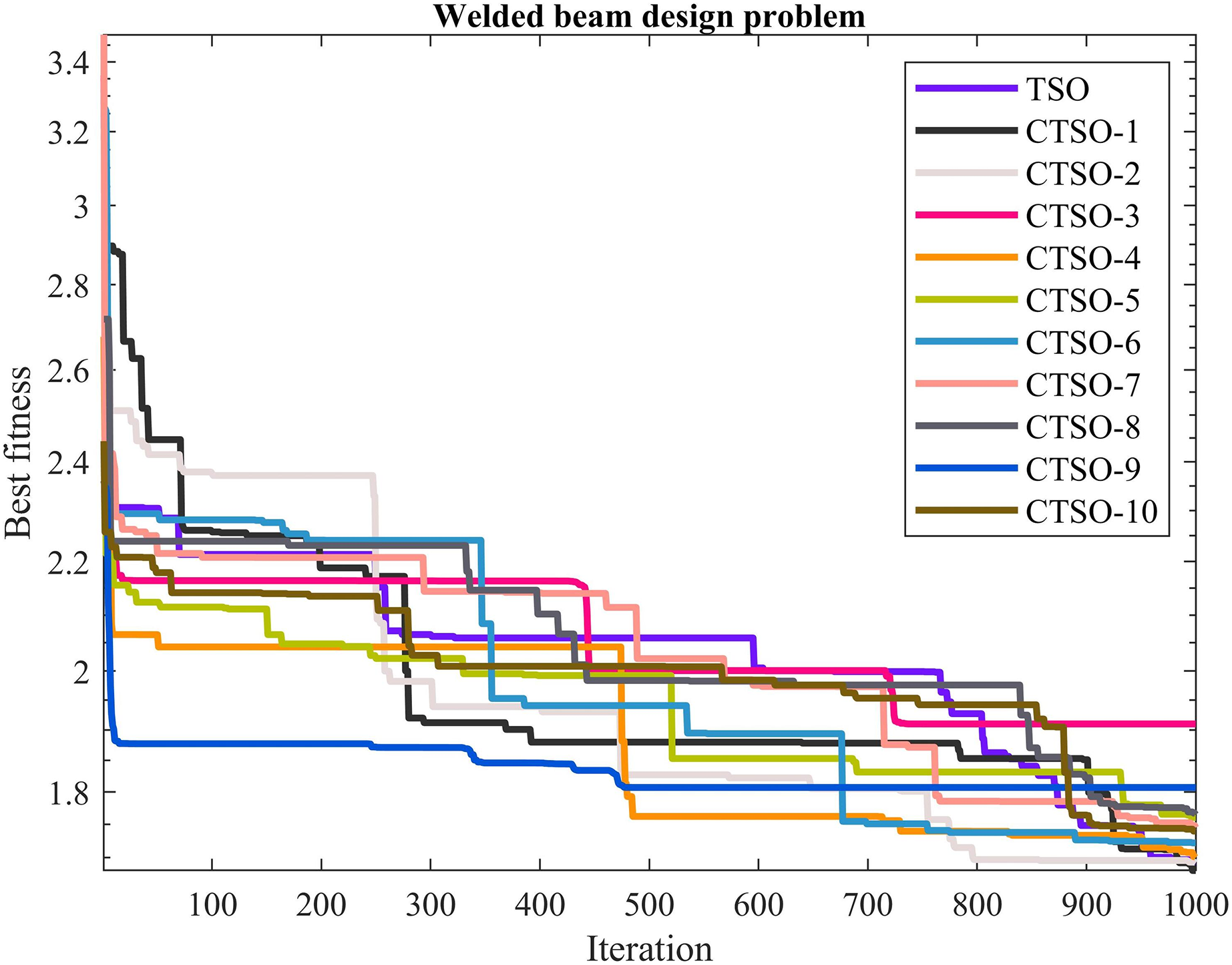
The comparative values of the performances of the 10 proposed CTSO methods and standard TSO methods on the welded beam design problem are presented in Table 10. The best, average, worst, and standard deviation values of the methods used are shown in Table 10. In addition, the decision variables depending on the best value of the methods used in the results of 30 runs on this problem are given in Table 11. When Table 10 is examined, it is seen that CTSO-1 is superior to other methods on the basis of the best value, and CTSO-4 is more successful when analyzed on the basis of mean value. In addition, the convergence graph of the methods used on the welded beam design problem is shown in Fig. 10.
| Algorithm | Best | Mean | Worst | SD |
|---|---|---|---|---|
| TSO | 1.691099 | 2.765785 | 3.713832 | 0.681901 |
| CTSO1 | 1.680985 | 2.706922 | 3.696062 | 0.69335 |
| CTSO2 | 1.692163 | 2.630818 | 3.687721 | 0.754546 |
| CTSO3 | 1.909833 | 3.307382 | 5.11409 | 0.943303 |
| CTSO4 | 1.699917 | 2.416367 | 3.745437 | 0.663697 |
| CTSO5 | 1.760383 | 2.792383 | 3.786065 | 0.544282 |
| CTSO6 | 1.721776 | 2.423815 | 3.684699 | 0.621039 |
| CTSO7 | 1.74493 | 2.67853 | 3.994741 | 0.69217 |
| CTSO8 | 1.764811 | 2.587149 | 3.675218 | 0.590975 |
| CTSO9 | 1.807061 | 3.159026 | 6.243182 | 1.010093 |
| CTSO10 | 1.739581 | 2.665869 | 3.709204 | 0.646727 |
| Algorithm | Parameters values | fmin | |||
|---|---|---|---|---|---|
| TSO | 0.198654 | 3.371947 | 9.112068 | 0.202756 | 1.691099 |
| CTSO1 | 0.200332 | 3.329221 | 9.164297 | 0.200695 | 1.680985 |
| CTSO2 | 0.195439 | 3.539739 | 9.191104 | 0.198922 | 1.692163 |
| CTSO3 | 0.235488 | 3.063879 | 8.008572 | 0.261938 | 1.909833 |
| CTSO4 | 0.202884 | 3.345369 | 9.074833 | 0.204389 | 1.699917 |
| CTSO5 | 0.146154 | 4.743619 | 9.193987 | 0.19883 | 1.760383 |
| CTSO6 | 0.197589 | 3.424587 | 8.970536 | 0.209319 | 1.721776 |
| CTSO7 | 0.161839 | 4.37461 | 9.210771 | 0.198758 | 1.74493 |
| CTSO8 | 0.220815 | 3.104299 | 8.68097 | 0.223645 | 1.764811 |
| CTSO9 | 0.202509 | 3.452743 | 8.545876 | 0.230036 | 1.807061 |
| CTSO10 | 0.200633 | 3.398656 | 8.875607 | 0.213808 | 1.739581 |
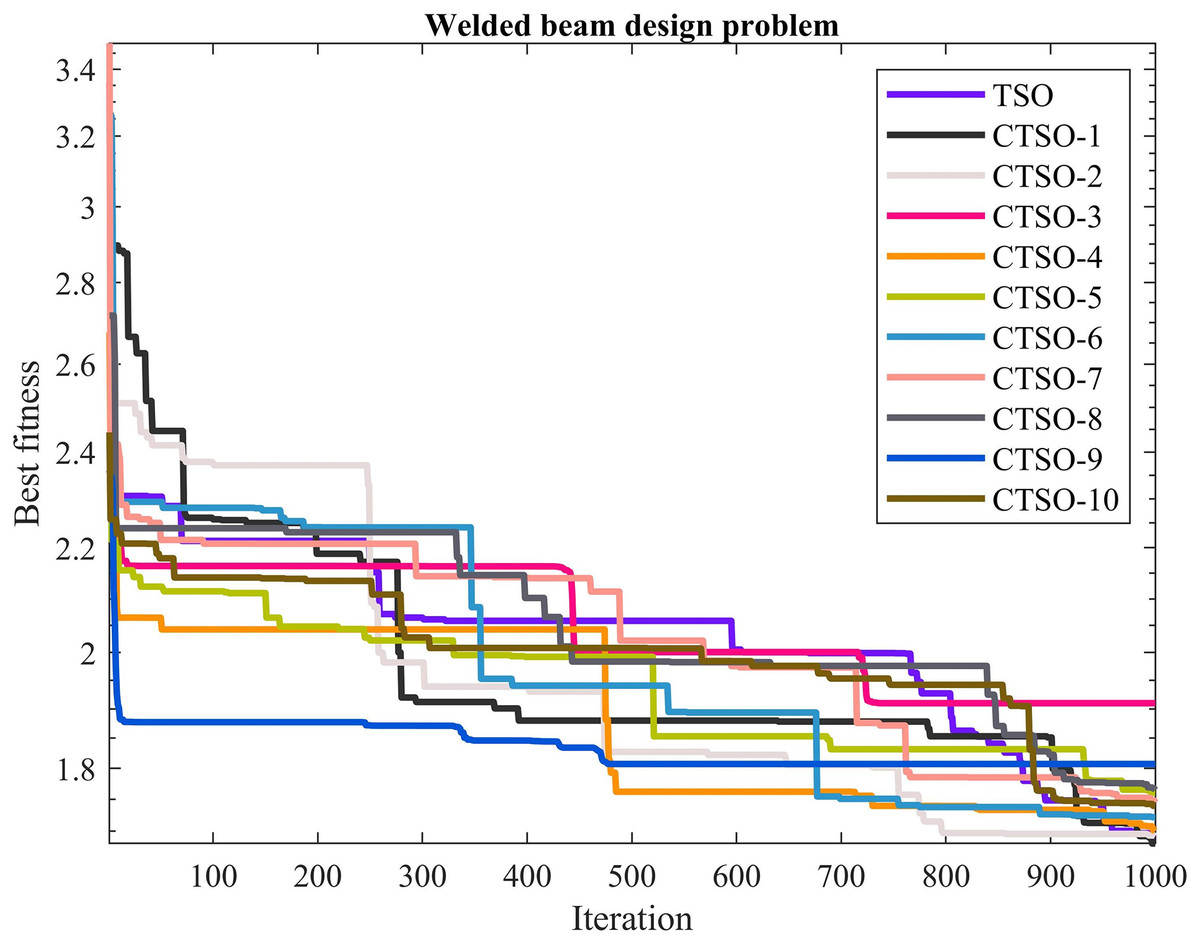
Figure 10: The convergence graph of the methods used on the welded beam design problem.
{kind=link}
Pressure vessel problem
The major goal of this issue is to optimize vessel formation, material use, and welding costs (He & Zhou, 2018). The objective function is constructed using four variables: shell thickness ( ), head thickness ( ), inner radius ( ), and length ( ), without accounting for vessel height. This issue contains four restrictions that must be met. Figure 11 depicts the pressure vessel design problem’s schematic structure. The mathematical representation of this problem is as in the Appendix 4.
Figure 11: Pressure vessel design problem.
{kind=link}
The comparative values of the performances of the 10 proposed CTSO methods and standard TSO methods on the pressure vessel design problem are presented in Table 12. The best, average, worst, and standard deviation values of the methods used are shown in Table 12. In addition, the decision variables depending on the best value of the methods used in the results of 30 runs on this problem are given in Table 13. When Table 12 is examined, it is seen that CTSO-2 is superior to other methods on the basis of the best value, and CTSO-5 is more successful when analyzed on the basis of mean value. In addition, the convergence graph of the methods used on the pressure vessel design problem is shown in Fig. 12.
| Algorithm | Best | Mean | Worst | SD |
|---|---|---|---|---|
| TSO | 6,591.539 | 9,358.735 | 15,198.4 | 2,047.207 |
| CTSO1 | 6,934.041 | 9,290.626 | 12,997.45 | 1,833.564 |
| CTSO2 | 6,325.269 | 8,872.022 | 13,581.73 | 2,116.409 |
| CTSO3 | 6,720.31 | 18,807.36 | 55,057.06 | 10,642.19 |
| CTSO4 | 6,485.754 | 8,708.514 | 13,722.88 | 1,568.458 |
| CTSO5 | 6,479.417 | 8,662.113 | 12,317.9 | 1,380.715 |
| CTSO6 | 6,494.753 | 8,878.358 | 13,742.33 | 1,651.033 |
| CTSO7 | 6,782.928 | 8,763.569 | 12,770.58 | 1,438.112 |
| CTSO8 | 6,722.005 | 8,687.164 | 14,207.82 | 1,804.541 |
| CTSO9 | 7,836.811 | 17,484.35 | 38,598.81 | 8,019.801 |
| CTSO10 | 6,794.113 | 8,275.311 | 11,169.49 | 1,131.863 |
| Algorithm | Parameters values | fmin | |||
|---|---|---|---|---|---|
| TSO | 1 | 0.5 | 49.9536 | 98.7225 | 6,591.539 |
| CTSO1 | 1.0625 | 0.5625 | 53.06296 | 75.76345 | 6,934.041 |
| CTSO2 | 0.875 | 0.5 | 45.277 | 140.8673 | 6,325.269 |
| CTSO3 | 1 | 0.5625 | 51.66779 | 85.64049 | 6,720.31 |
| CTSO4 | 1 | 0.5 | 51.01429 | 90.49689 | 6,485.754 |
| CTSO5 | 1 | 0.5 | 51.10119 | 89.90082 | 6,479.417 |
| CTSO6 | 0.9375 | 0.5 | 47.36856 | 120.7645 | 6,494.753 |
| CTSO7 | 1.0625 | 0.5625 | 54.90602 | 63.63404 | 6,782.928 |
| CTSO8 | 1 | 0.5625 | 51.64737 | 85.79055 | 6,722.005 |
| CTSO9 | 1.25 | 0.5 | 51.69956 | 85.4083 | 7,836.811 |
| CTSO10 | 1.0625 | 0.5625 | 54.77942 | 64.46914 | 6,794.113 |
Figure 12: The convergence graph of the methods used on the pressure vessel problem.
{kind=link}
Three bar truss design problem
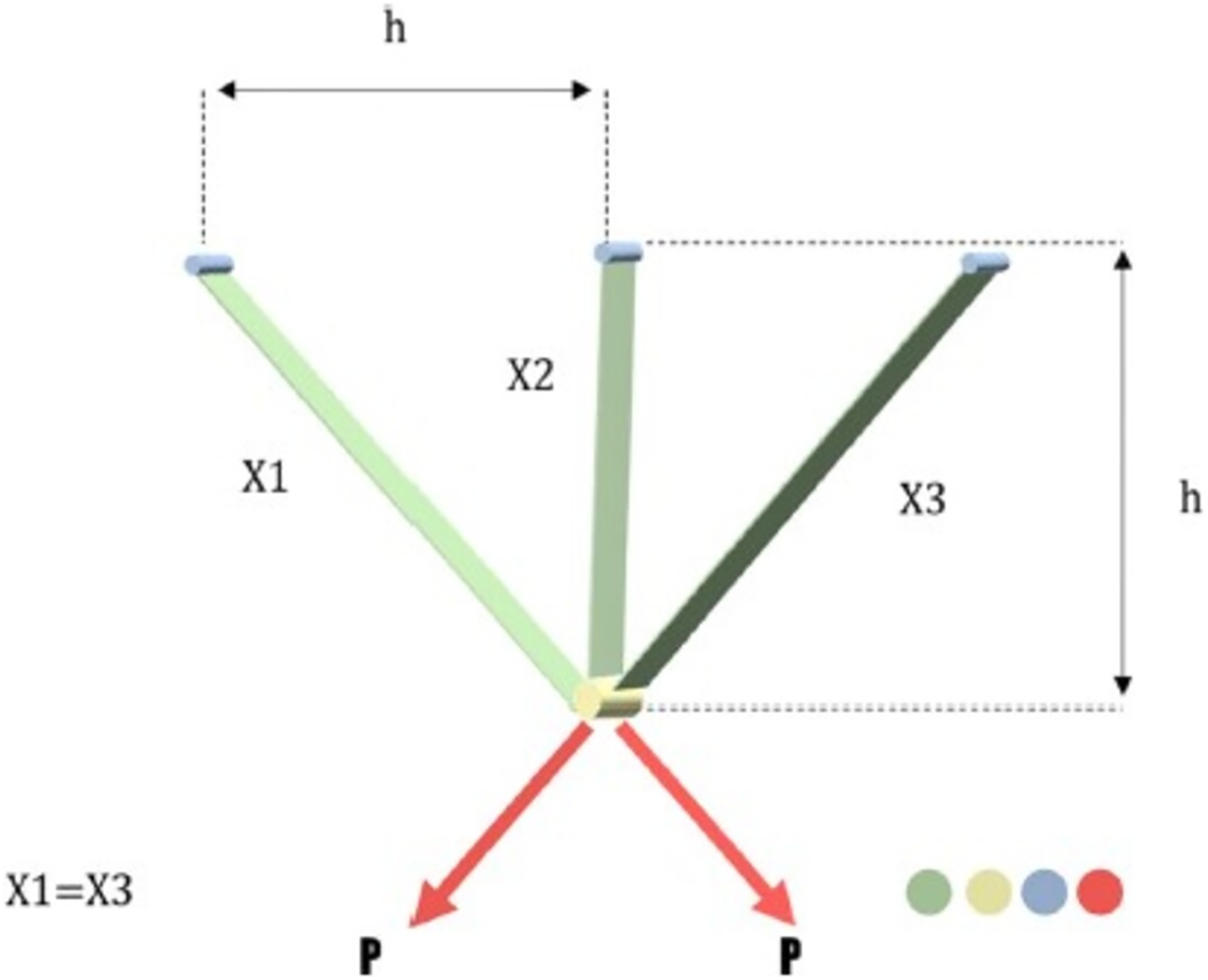
In civil engineering, this issue is referred to as a structural optimization problem. By modifying the cross-sectional areas ( and ) while taking into consideration the stress (σ) on each of the truss members, Nowacki’s issue seeks to reduce the volume of the three-bar truss. These values’ possible value ranges are . The graphical illustration of this problem’s mathematical formulation is shown in Fig. 13. The mathematical representation of this problem is as in the Appendix 5.
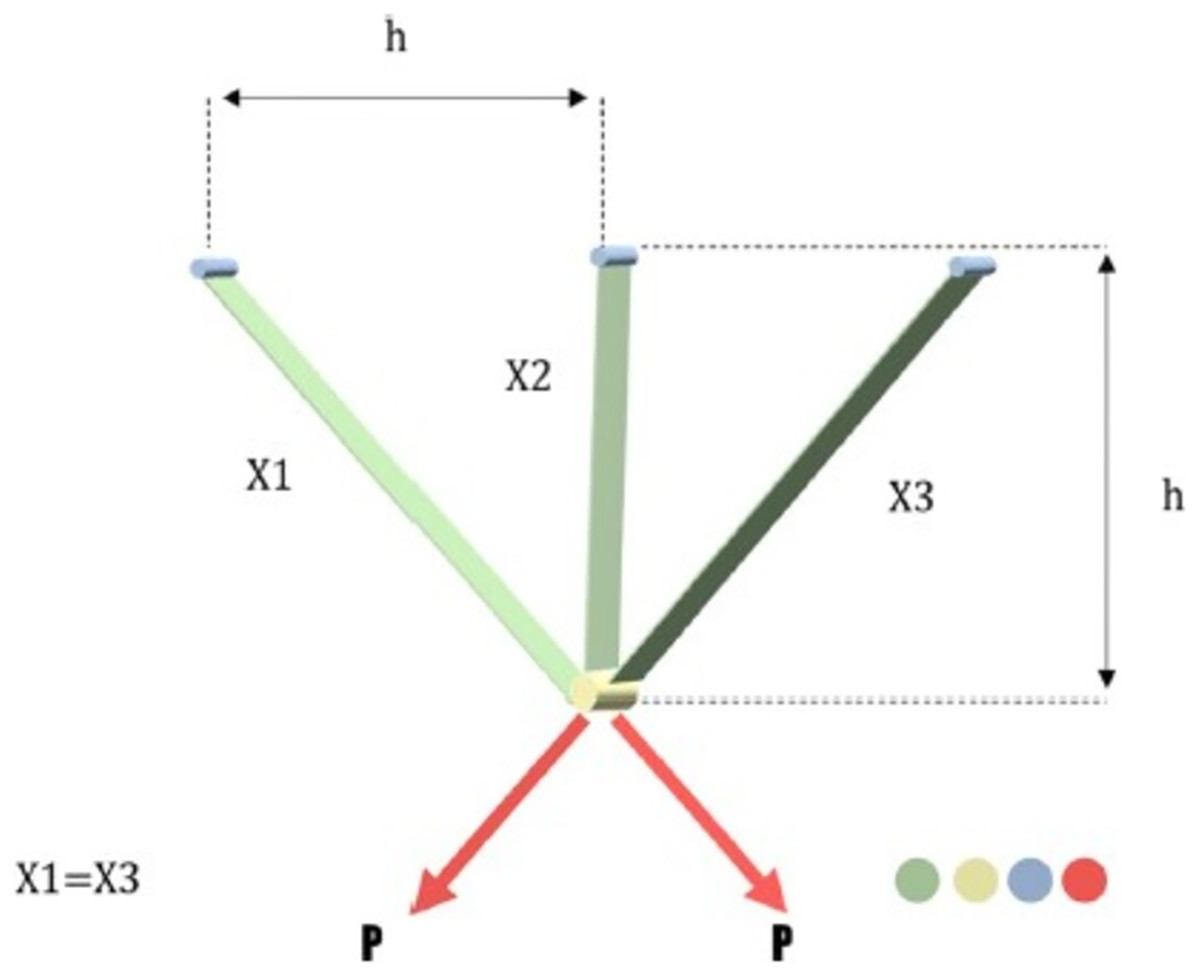
Figure 13: Three bar truss design problem.
{kind=link}
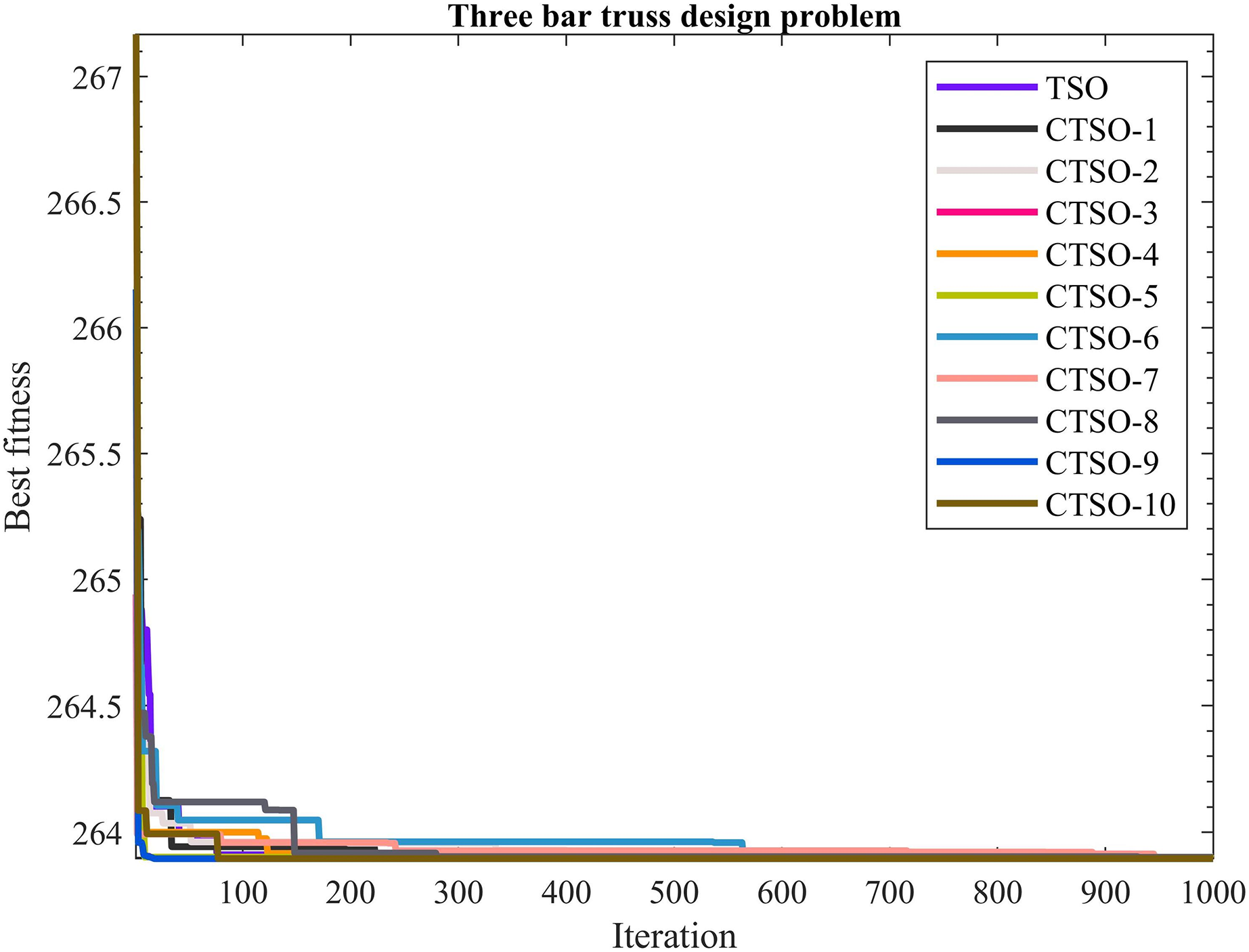
The comparative values of the performances of the 10 proposed CTSO methods and standard TSO methods on the three-bar truss design problem are presented in Table 14. The best, average, worst, and standard deviation values of the methods used are shown in Table 14. In addition, the decision variables depending on the best value of the methods used in the results of 30 runs on this problem are given in Table 15. When Table 14 is examined, it is seen that CTSO-9 is superior to other methods on the basis of the best value, and CTSO-10 is more successful when analyzed on the basis of mean value. In addition, the convergence graph of the methods used on the three-bar truss design problem is shown in Fig. 14.
| Algorithm | Best | Mean | Worst | SD |
|---|---|---|---|---|
| TSO | 263.8964 | 264.5518 | 270.4717 | 1.648298 |
| CTSO1 | 263.8987 | 264.8722 | 270.7144 | 2.06893 |
| CTSO2 | 263.9028 | 264.7003 | 270.7078 | 1.696716 |
| CTSO3 | 263.9005 | 266.5551 | 274.3699 | 2.902827 |
| CTSO4 | 263.8962 | 264.4986 | 270.7534 | 1.375953 |
| CTSO5 | 263.8963 | 264.5397 | 270.3816 | 1.46023 |
| CTSO6 | 263.9002 | 264.6418 | 270.7240 | 1.362083 |
| CTSO7 | 263.8966 | 264.6414 | 270.6517 | 1.388371 |
| CTSO8 | 263.9014 | 264.5663 | 270.3992 | 1.670418 |
| CTSO9 | 263.8957 | 266.2048 | 281.5610 | 3.621051 |
| CTSO10 | 263.8962 | 264.3218 | 270.7161 | 1.223462 |
| Algorithm | Parameters values | fmin | |
|---|---|---|---|
| TSO | 0.787491 | 0.411599 | 263.8964 |
| CTSO1 | 0.786632 | 0.414043 | 263.8987 |
| CTSO2 | 0.786469 | 0.41449 | 263.9028 |
| CTSO3 | 0.791316 | 0.40082 | 263.9005 |
| CTSO4 | 0.788856 | 0.407739 | 263.8962 |
| CTSO5 | 0.787869 | 0.410515 | 263.8963 |
| CTSO6 | 0.790911 | 0.401968 | 263.9002 |
| CTSO7 | 0.789892 | 0.404812 | 263.8966 |
| CTSO8 | 0.785835 | 0.416332 | 263.9014 |
| CTSO9 | 0.789298 | 0.40648 | 263.8957 |
| CTSO10 | 0.787728 | 0.41092 | 263.8962 |
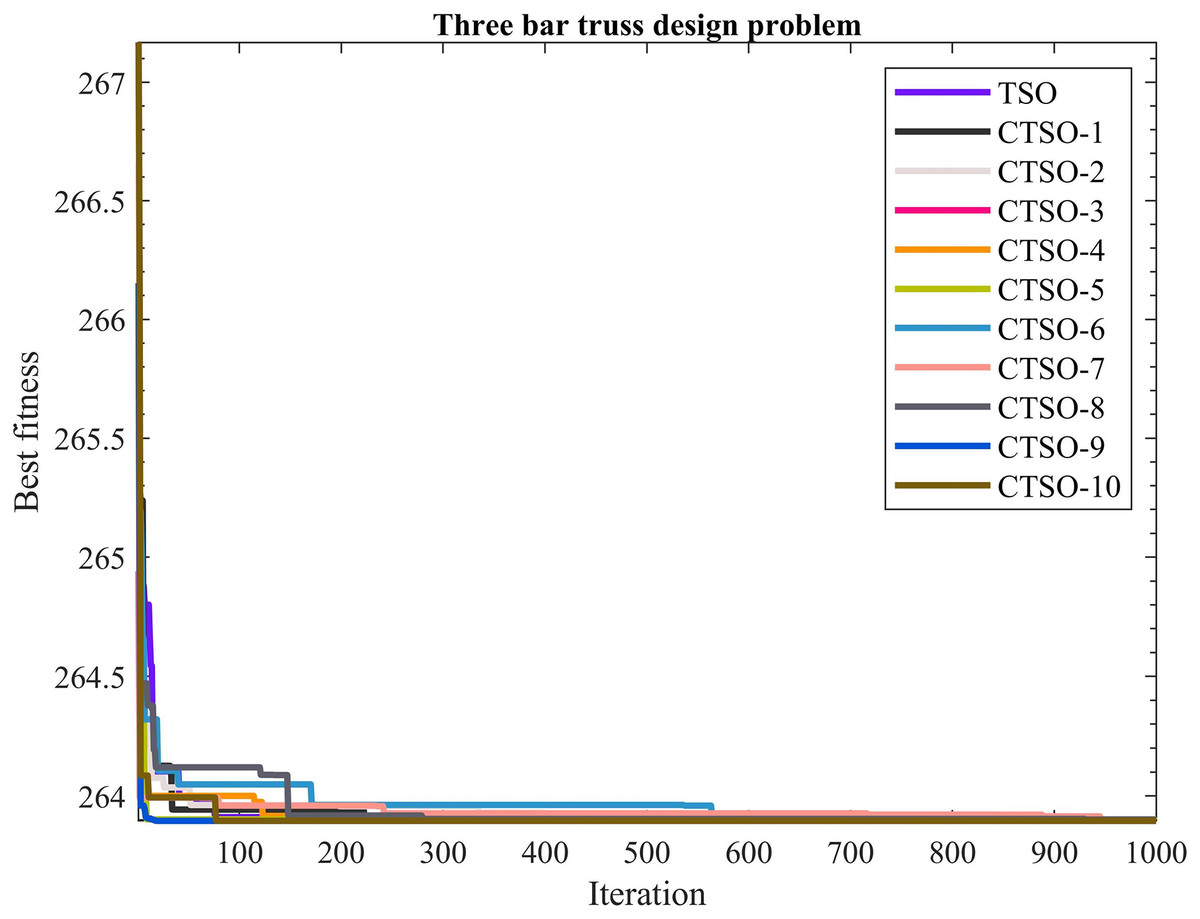
Figure 14: The convergence graph of the methods used on the three-bar truss design problem.
{kind=link}
Analysis of CTSOs in real-world engineering problems with other metaheuristic optimization algorithms
The speed reducer problem has been solved by many different researchers in the literature with different metaheuristic optimization methods. The classical TSO and the proposed CTSO method were compared with the Moth Flame Optimization Algorithm (MFO) (Mirjalili, 2015), Weighted Superposition Attraction (WSA) (Baykaso, 2015), Grey Wolf Optimization (GWO) (Mirjalili, Mirjalili & Lewis, 2014), Artificial Acari Optimization (AAO) (Czerniak, Zarzycki & Ewald, 2017), Sine Cosine Algorithm (SCA) (Mirjalili, 2016), and Arithmetic Optimization Algorithm (AOA) (Abualigah et al., 2021a) methods in the literature. The best cost and related decision variables obtained by the proposed method and the methods proposed by other researchers for the speed reducer problem are presented in Table 16. When the results obtained were examined, it was observed that the proposed CTSO-3 and CTSO-9 method gave a much better result than the classical TSO and other competitive methods.
| Algorithm | Parameters values | fmin | ||||||
|---|---|---|---|---|---|---|---|---|
| MFO (Mirjalili, 2015) | 3.497455 | 0.700 | 17 | 7.82775 | 7.712457 | 3.351787 | 5.286352 | 2,998.941 |
| WSA (Baykaso, 2015) | 3.500 | 0.7 | 17 | 7.3 | 7.8 | 3.350215 | 5.286683 | 2,996.348 |
| GWO (Mirjalili, Mirjalili & Lewis, 2014) | 3.501 | 0.7 | 17 | 7.3 | 7.811013 | 3.350704 | 5.287411 | 2,997.820 |
| AAO (Czerniak, Zarzycki & Ewald, 2017) | 3.4999 | 0.7 | 17 | 7.3 | 7.8 | 3.3502 | 5.2877 | 2,997.058 |
| SCA (Mirjalili, 2016) | 3.521 | 0.7 | 17 | 8.3 | 7.923351 | 3.355911 | 5.300734 | 3,026.838 |
| AOA (Abualigah et al., 2021a) | 3.50384 | 0.7 | 17 | 7.3 | 7.72933 | 3.35649 | 5.2867 | 2,997.916 |
| TSO | 3.501019 | 0.7 | 17 | 7.3 | 7.917685 | 3.367619 | 5.349237 | 3,043.966 |
| CTSO-3 | 3.49999 | 0.7 | 17 | 7.3 | 7.715319 | 3.350541 | 5.286655 | 2,994.423 |
| CTSO-9 | 3.49999 | 0.7 | 17 | 7.3 | 7.715319 | 3.350541 | 5.286654 | 2,994.423 |
There are many methods in the literature to solve the tension compression spring design problem. The classical TSO and the proposed CTSO method were compared with the HGSO, AAO, Whale Optimization Algorithm (WOA) (Mirjalili & Lewis, 2016), Harris Hawk Optimization (HHO) (Heidari et al., 2019), Chaotic Bird Swarm Algorithm (CMBSA) (Varol Altay & Alatas, 2020), Salp Swarm Algorithm (SSA) (Mirjalili et al., 2017), Cumulative Binomial Probability Particle Swarm Optimization (CBPPSO) (Agrawal & Tripathi, 2021), and Competitive Bird Swarm Algorithm (CBSA) (Wang, Deng & Duan, 2018) methods in the literature. The results obtained from this comparison are given in Table 17. Table 17 presents the best cost and relevant decision variables for the tension compression spring design problem. When the literature and the results of the experiments are examined, it is concluded that CTSO-9 gives better results than classical TSO and competitive methods in the literature.
| Algorithm | Parameters values | fmin | ||
|---|---|---|---|---|
| HGSO (Hashim et al., 2019) | 0.0518 | 0.3569 | 11.2023 | 0.0127 |
| AAO (Czerniak, Zarzycki & Ewald, 2017) | 0.0517 | 0.3581 | 11.2015 | 0.0127 |
| WOA (Mirjalili & Lewis, 2016) | 0.0512 | 0.3452 | 12.004 | 0.0127 |
| HHO (Heidari et al., 2019) | 0.0543 | 0.4239 | 8.2187 | 0.0128 |
| CMBSA (Varol Altay & Alatas, 2020) | 0.0519 | 0.3618 | 11.000 | 0.0127 |
| SSA (Mirjalili et al., 2017) | 0.0516 | 0.3547 | 11.4059 | 0.0127 |
| CBPPSO (Agrawal & Tripathi, 2021) | 0.0512 | 0.3465 | 11.9097 | 0.0127 |
| CBSA (Wang, Deng & Duan, 2018) | 0.0516 | 0.3566 | 11.2918 | 0.0127 |
| TSO | 0.05215 | 0.367888 | 10.66628 | 0.012673 |
| CTSO-9 | 0.05119 | 0.344834 | 12.02127 | 0.012670 |
Welded beam design problem has been solved by many different researchers in the literature with different metaheuristic optimization methods. The classical TSO and the proposed CTSO method were compared with the HGSO, MAOA, HHO, CMBSA, CBBSA, CBPPSO, Chaotic Grey Wolf Optimization (CGWO) (Kohli & Arora, 2018), Differential Big Bang-Big Crunch Algorithm (DBCA) (Prayogo et al., 2018), Sonar Inspired Optimization (SIO) (Tzanetos & Dounias, 2020), and Hybrid Genetic Algorithm-Ant Colony Optimization-Particle Swarm Optimization (H-GA-ACO-PSO) (Tam et al., 2019) methods in the literature. The best cost and relevant decision variables obtained by the proposed method and the methods proposed by other researchers for the welded beam design problem are presented in Table 18. When the results obtained were examined, it was observed that the proposed CTSO-1 method gave a much better result than the classical TSO and other competitive methods.
| Algorithm | Parameters values | fmin | |||
|---|---|---|---|---|---|
| HGSO (Hashim et al., 2019) | 0.2054 | 3.4476 | 9.0269 | 0.2060 | 1.7260 |
| MAOA (Altay, 2022a) | 0.2057 | 3.4705 | 9.0366 | 0.2057 | 1.7246 |
| HHO (Heidari et al., 2019) | 0.1956 | 3.7730 | 9.0307 | 0.2060 | 1.7501 |
| CMBSA (Varol Altay & Alatas, 2020) | 0.2057 | 3.4702 | 9.0377 | 0.2057 | 1.7249 |
| CBPPSO (Agrawal & Tripathi, 2021) | 0.2057 | 3.4704 | 9.0366 | 0.2057 | 1.7249 |
| CGWO (Kohli & Arora, 2018) | 0.3439 | 1.8836 | 9.0313 | 0.2121 | 1.7255 |
| DBCA (Prayogo et al., 2018) | 0.2057 | 3.4705 | 9.0366 | 0.2057 | 1.7249 |
| SIO (Tzanetos & Dounias, 2020) | 0.3314 | 2.0174 | 9.0459 | 0.2088 | 1.7621 |
| H-GA-ACO-PSO (Tam et al., 2019) | 0.2057 | 3.4705 | 9.0366 | 0.2057 | 1.7249 |
| TSO | 0.198654 | 3.371947 | 9.112068 | 0.202756 | 1.6911 |
| CTSO-1 | 0.200332 | 3.329221 | 9.164297 | 0.200695 | 1.6810 |
The pressure vessel problem has been solved by many different researchers in the literature with different metaheuristic optimization methods. The classical TSO and the proposed CTSO method were compared with the MAOA, CSMA, AAO, HHO, CMBSA, SSA, CBPPSO, H-GA-ACO-PSO, and Adaptive Reinforcement Learning based Bat Algorithm (ARLBAT) (Meng, Li & Gao, 2019) methods in the literature. The best cost of the proposed method and the methods suggested by other researchers for the pressure vessel problem and the relevant decision variables are shown in Table 19. When the results are examined, it is seen that the CSMA method gives a better result than the proposed CTSOs, classical TSO and other competitive methods.
| Algorithm | Parameters values | fmin | |||
|---|---|---|---|---|---|
| MAOA (Altay, 2022a) | 0.7953 | 0.3931 | 41.2274 | 187.7371 | 5,914.48511 |
| CSMA (Altay, 2022c) | 0.7778 | 0.3845 | 40.3207 | 199.9850 | 5,882.0851 |
| AAO (Czerniak, Zarzycki & Ewald, 2017) | 0.8125 | 0.4375 | 42.0985 | 176.6366 | 6,059.7140 |
| HHO (Heidari et al., 2019) | 0.8540 | 0.4329 | 44.0025 | 154.3888 | 6,543.4802 |
| CMBSA (Varol Altay & Alatas, 2020) | 0.7780 | 0.3850 | 40.3200 | 200.0000 | 5,883.8610 |
| SSA (Mirjalili et al., 2017) | 0.7807 | 0.3859 | 40.4707 | 197.9081 | 6,149.0232 |
| CBPPSO (Agrawal & Tripathi, 2021) | 1.125 | 0.6250 | 62.9866 | 20.00000 | 6,952.7200 |
| H-GA-ACO-PSO (Tam et al., 2019) | 0.8125 | 0.4375 | 42.0984 | 176.6366 | 6,059.7143 |
| ARLBAT (Meng, Li & Gao, 2019) | 0.8125 | 0.4375 | 42.0984 | 176.6366 | 6,059.7143 |
| TSO | 1 | 0.5 | 49.9536 | 98.7225 | 6,591.5390 |
| CTSO-2 | 0.875 | 0.5 | 45.277 | 140.8673 | 6,325.2690 |
The three bar truss problem has been solved by many different researchers in the literature with different metaheuristic optimization methods. The classical TSO and the proposed CTSO method were compared with the AOA, SSA, CBPPSO, Cuckoo Search (CS) (Gandomi, Yang & Alavi, 2013), and mine blast algorithm (MBA) (Sadollah et al., 2013) methods in the literature. The best cost and relevant decision variables obtained by the proposed method and the methods proposed by other researchers for the three bar truss problem are shown in Table 20. When the literature and the results of the experiments are examined, it is concluded that CTSO-9 gives better results than classical TSO and competitive methods in the literature.
| Algorithm | Parameters values | fmin | |
|---|---|---|---|
| AOA (Abualigah et al., 2021a) | 0.79369 | 0.39426 | 263.9154 |
| SSA (Mirjalili et al., 2017) | 0.78866541 | 0.408275784 | 263.8958 |
| CS (Gandomi, Yang & Alavi, 2013) | 0.78867 | 0.40902 | 263.9716 |
| MBA (Sadollah et al., 2013) | 0.7885650 | 0.4085597 | 263.8959 |
| TSO | 0.787491 | 0.411599 | 263.8964 |
| CTSO-9 | 0.789298 | 0.40648 | 263.8957 |
Feature selection
This section shows a comparison of performance between the suggested 10 distinct CTSO approaches and the state-of-the-art over ten different benchmark datasets using standard TSO and the state-of-the-art (Australian, ionosphere, spectheart, sonar, wine, heart, thyroid, tic-tac-toe, vehicle, krvskp). These datasets, whose descriptions are provided in Table 21, include a broad variety of attributes and come in various shapes and sizes. The purpose of this experiment is to assess the applicability of the suggested CTSO approaches for feature selection by analyzing their impact on benchmark datasets and comparing their performance to existing techniques. The experiment will explicitly look at how much better the performance of different datasets is when compared to the other suggested approaches. The efficiency of the recommended CTSO approaches is assessed using the accuracy measure, the standard deviation, and the number of features. The minimum, average, and maximum fitness values are also taken into account.
| Datasets | Number of features | Number of instances | Classes |
|---|---|---|---|
| Australian | 14 | 690 | 2 |
| Ionosphere | 34 | 351 | 2 |
| Spectheart | 44 | 267 | 2 |
| Sonar | 60 | 208 | 2 |
| Wine | 13 | 178 | 3 |
| Heart | 13 | 270 | 2 |
| Thyroid | 21 | 7,200 | 3 |
| Tic-tac-toe | 9 | 958 | 2 |
| Vehicle | 18 | 846 | 4 |
| Krvskp | 36 | 3,196 | 2 |
The population size for this experiment was set at 10, and the maximum number of iterations was 100. The suggested 10 different CTSO results were contrasted with standard TSO. Tables 22 and 23 for each of the 10 benchmark datasets show the proposed CTSO strategy and all other techniques investigated, together with their minimum and average fitness values. When Table 22 is examined, the CTSO-9 method gave the best results in five of the 10 data sets and came first. It was followed by the CTSO-3 method, which gave the best results in four out of 10 datasets. When Table 23 is examined, CTSO-1, CTSO-3, CTSO-5, and CTSO-9 methods achieved the best results in 2 out of 10 data sets. CTSO-2 and CTSO-8 did not find good results on any dataset.
| Australian | Ionosphere | Spectheart | Sonar | Wine | Heart | Thyroid | Tic-tac-toe | Vehicle | Krvskp | |
|---|---|---|---|---|---|---|---|---|---|---|
| CTSO-1 | 0.1739 | 0.0286 | 0.1509 | 0.0244 | 0.0286 | 0.1667 | 0.0174 | 0.1832 | 0.2722 | 0.0407 |
| CTSO-2 | 0.1522 | 0.0286 | 0.1509 | 0.0488 | 0.0286 | 0.1667 | 0.0194 | 0.1832 | 0.2663 | 0.0407 |
| CTSO-3 | 0.1522 | 0.0429 | 0.1132 | 0.0488 | 0.0286 | 0.1852 | 0.0174 | 0.1780 | 0.2485 | 0.0313 |
| CTSO-4 | 0.1522 | 0.0429 | 0.1509 | 0.0244 | 0.0286 | 0.1481 | 0.0194 | 0.1780 | 0.2899 | 0.0407 |
| CTSO-5 | 0.1667 | 0.0429 | 0.1321 | 0.0244 | 0.0286 | 0.1296 | 0.0181 | 0.1780 | 0.2663 | 0.0454 |
| CTSO-6 | 0.1667 | 0.0429 | 0.1698 | 0.0488 | 0.0000 | 0.1852 | 0.0194 | 0.1780 | 0.2722 | 0.0438 |
| CTSO-7 | 0.1522 | 0.0429 | 0.1509 | 0.0488 | 0.0286 | 0.1481 | 0.0167 | 0.1780 | 0.2840 | 0.0579 |
| CTSO-8 | 0.1594 | 0.0286 | 0.1698 | 0.0244 | 0.0286 | 0.1481 | 0.0201 | 0.1780 | 0.2840 | 0.0391 |
| CTSO-9 | 0.1594 | 0.0429 | 0.1321 | 0.0244 | 0.0000 | 0.1296 | 0.0167 | 0.1780 | 0.2781 | 0.0266 |
| CTSO-10 | 0.1594 | 0.0429 | 0.1698 | 0.0000 | 0.0286 | 0.1481 | 0.0181 | 0.1832 | 0.2899 | 0.0297 |
| TSO | 0.1884 | 0.0714 | 0.2075 | 0.0976 | 0.0571 | 0.2407 | 0.0264 | 0.2042 | 0.3077 | 0.0704 |
| AO | 0.2174 | 0.0857 | 0.2453 | 0.0976 | 0.0857 | 0.2407 | 0.0319 | 0.2304 | 0.3136 | 0.1017 |
| SMA | 0.1739 | 0.0714 | 0.1887 | 0.0976 | 0.0857 | 0.2407 | 0.0278 | 0.2461 | 0.3254 | 0.0908 |
| WOA | 0.1739 | 0.0571 | 0.1698 | 0.0488 | 0.0571 | 0.2037 | 0.0229 | 0.2042 | 0.2840 | 0.0595 |
| Australian | Ionosphere | Spectheart | Sonar | Wine | Heart | Thyroid | Tic-tac-toe | Vehicle | Krvskp | |
|---|---|---|---|---|---|---|---|---|---|---|
| CTSO-1 | 0.1768 | 0.0629 | 0.1811 | 0.0585 | 0.0486 | 0.2037 | 0.0238 | 0.2042 | 0.2888 | 0.0520 |
| CTSO-2 | 0.1768 | 0.0529 | 0.1736 | 0.0610 | 0.0429 | 0.2056 | 0.0245 | 0.2042 | 0.2970 | 0.0548 |
| CTSO-3 | 0.1674 | 0.0500 | 0.1717 | 0.0561 | 0.0486 | 0.2056 | 0.0238 | 0.1984 | 0.2905 | 0.0601 |
| CTSO-4 | 0.1804 | 0.0557 | 0.1755 | 0.0585 | 0.0514 | 0.1963 | 0.0244 | 0.1848 | 0.3024 | 0.0527 |
| CTSO-5 | 0.1754 | 0.0500 | 0.1792 | 0.0537 | 0.0429 | 0.1815 | 0.0234 | 0.2073 | 0.2911 | 0.0546 |
| CTSO-6 | 0.1848 | 0.0629 | 0.1811 | 0.0659 | 0.0286 | 0.1926 | 0.0235 | 0.2000 | 0.2941 | 0.0576 |
| CTSO-7 | 0.1833 | 0.0714 | 0.1736 | 0.0561 | 0.0343 | 0.2056 | 0.0228 | 0.1848 | 0.2959 | 0.0726 |
| CTSO-8 | 0.1717 | 0.0543 | 0.1849 | 0.0561 | 0.0486 | 0.2093 | 0.0221 | 0.1969 | 0.2994 | 0.0562 |
| CTSO-9 | 0.1696 | 0.0543 | 0.1604 | 0.0561 | 0.0429 | 0.1907 | 0.0214 | 0.1995 | 0.2929 | 0.0538 |
| CTSO-10 | 0.1899 | 0.0643 | 0.1792 | 0.0512 | 0.0486 | 0.1852 | 0.0224 | 0.1990 | 0.2970 | 0.0592 |
| TSO | 0.2268 | 0.0829 | 0.2283 | 0.0976 | 0.0971 | 0.2667 | 0.0332 | 0.2209 | 0.3124 | 0.0889 |
| AO | 0.2638 | 0.0929 | 0.2679 | 0.1073 | 0.1286 | 0.2722 | 0.0382 | 0.2613 | 0.3331 | 0.1668 |
| SMA | 0.1826 | 0.0857 | 0.1943 | 0.1024 | 0.1114 | 0.2574 | 0.0334 | 0.2555 | 0.3385 | 0.1319 |
| WOA | 0.2014 | 0.0643 | 0.1868 | 0.0585 | 0.0600 | 0.2185 | 0.0276 | 0.2105 | 0.2982 | 0.0714 |
Tables 24 and 25 for each of the 10 benchmark datasets show the proposed CTSO strategy and all other techniques investigated, together with their average and maximum accuracy measures. When Table 24 is examined, WOA method achieved the best results in 4 out of 10 data sets and were ranked first according to the average accuracy measure value. The CTSO-1, CTSO-2, CTSO-3, CTSO-4, CTSO-5, CTSO-8, TSO, and AO methods did not produce a high value in any of the 10 datasets. When Table 25 is examined, the CTSO-9 method obtained the highest value in 5 out of 10 data sets according to the maximum accuracy metric. It is followed by CTSO-6 and CTSO-7, producing the highest value in 4 out of 10 datasets. The CTSO-2, CTSO-6, TSO, AO, SMA, and WOA methods could not gain superiority in any data set.
| Australian | Ionosphere | Spectheart | Sonar | Wine | Heart | Thyroid | Tic-tac-toe | Vehicle | Krvskp | |
|---|---|---|---|---|---|---|---|---|---|---|
| CTSO-1 | 78.1884 | 92.1429 | 79.0566 | 92.1951 | 93.7143 | 77.5926 | 96.9792 | 78.1152 | 68.8757 | 92.8326 |
| CTSO-2 | 78.7681 | 91.5714 | 78.1132 | 92.1951 | 95.1429 | 76.6667 | 97.3056 | 77.5916 | 69.6450 | 92.9421 |
| CTSO-3 | 76.5942 | 92.1429 | 78.4906 | 92.6829 | 93.7143 | 76.2963 | 97.5486 | 78.1152 | 70.0592 | 91.1111 |
| CTSO-4 | 77.5362 | 92.2857 | 79.8113 | 93.4146 | 93.1429 | 78.5185 | 97.2292 | 80.0524 | 68.9349 | 92.0344 |
| CTSO-5 | 79.6377 | 92.8571 | 78.8679 | 92.1951 | 95.1429 | 76.6667 | 97.5278 | 77.4346 | 69.4675 | 92.9890 |
| CTSO-6 | 78.9130 | 92.5714 | 80.1887 | 93.4146 | 95.7143 | 77.5926 | 97.6181 | 78.4817 | 69.8225 | 92.9890 |
| CTSO-7 | 79.1304 | 92.7143 | 77.9245 | 91.7073 | 95.4286 | 78.3333 | 97.4167 | 81.3613 | 69.3491 | 91.1894 |
| CTSO-8 | 78.9130 | 92.4286 | 77.7358 | 93.6585 | 94.5714 | 76.6667 | 97.5417 | 79.5812 | 68.9349 | 92.5509 |
| CTSO-9 | 79.8551 | 92.2857 | 79.4340 | 91.9512 | 94.5714 | 77.4074 | 97.6458 | 78.1152 | 69.2308 | 93.0673 |
| CTSO-10 | 79.3478 | 92.4286 | 80.1887 | 93.4146 | 94.5714 | 79.4444 | 97.4583 | 79.0052 | 69.1124 | 91.0798 |
| TSO | 70.3623 | 89.5714 | 74.3396 | 89.5122 | 86.8571 | 71.8519 | 96.2778 | 73.9267 | 66.0947 | 86.0094 |
| AO | 73.6232 | 90.7143 | 73.2075 | 89.2683 | 87.1429 | 72.7778 | 96.1806 | 73.8743 | 66.6864 | 83.3177 |
| SMA | 81.7391 | 91.4286 | 80.5660 | 89.7561 | 88.8571 | 74.2593 | 96.6597 | 74.4503 | 66.1538 | 86.8075 |
| WOA | 79.8551 | 93.5714 | 81.3208 | 94.1463 | 94.0000 | 78.1481 | 97.2361 | 78.9529 | 70.1775 | 92.8638 |
| Australian | Ionosphere | Spectheart | Sonar | Wine | Heart | Thyroid | Tic-tac-toe | Vehicle | Krvskp | |
|---|---|---|---|---|---|---|---|---|---|---|
| CTSO-1 | 81.8841 | 95.7143 | 84.9057 | 95.1220 | 97.1429 | 81.4815 | 97.5000 | 80.1047 | 70.4142 | 95.9311 |
| CTSO-2 | 82.6087 | 94.2857 | 83.0189 | 95.1220 | 97.1429 | 81.4815 | 97.9861 | 81.6754 | 73.3728 | 94.9922 |
| CTSO-3 | 81.1594 | 94.2857 | 83.0189 | 95.1220 | 97.1429 | 79.6296 | 98.2639 | 82.1990 | 75.1479 | 93.5837 |
| CTSO-4 | 80.4348 | 94.2857 | 84.9057 | 95.1220 | 94.2857 | 85.1852 | 97.5000 | 82.1990 | 70.4142 | 94.3662 |
| CTSO-5 | 82.6087 | 95.7143 | 81.1321 | 95.1220 | 97.1429 | 85.1852 | 97.9167 | 79.5812 | 72.1893 | 94.9922 |
| CTSO-6 | 82.6087 | 94.2857 | 83.0189 | 95.1220 | 97.1429 | 81.4815 | 98.0556 | 81.1518 | 72.1893 | 95.1487 |
| CTSO-7 | 82.6087 | 95.7143 | 84.9057 | 95.1220 | 97.1429 | 85.1852 | 98.1944 | 82.1990 | 71.0059 | 92.6448 |
| CTSO-8 | 81.1594 | 95.7143 | 83.0189 | 97.5610 | 97.1429 | 85.1852 | 97.9861 | 81.1518 | 70.4142 | 96.0876 |
| CTSO-9 | 84.0580 | 95.7143 | 84.9057 | 95.1220 | 100.0000 | 83.3333 | 98.1944 | 82.1990 | 72.1893 | 94.8357 |
| CTSO-10 | 84.0580 | 92.8571 | 83.0189 | 97.5610 | 97.1429 | 85.1852 | 97.6389 | 81.1518 | 71.0059 | 93.8967 |
| TSO | 72.4638 | 91.4286 | 77.3585 | 90.2439 | 91.4286 | 74.0741 | 97.2222 | 76.4398 | 68.0473 | 90.7668 |
| AO | 78.2609 | 91.4286 | 75.4717 | 90.2439 | 91.4286 | 75.9259 | 96.8056 | 76.9634 | 68.6391 | 89.8279 |
| SMA | 82.6087 | 92.8571 | 81.1321 | 90.2439 | 91.4286 | 75.9259 | 97.2222 | 75.3927 | 67.4556 | 90.9233 |
| WOA | 82.6087 | 94.2857 | 83.0189 | 95.1220 | 94.2857 | 79.6296 | 97.7083 | 79.5812 | 71.5976 | 94.0532 |
Table 26 presents a comparison of CTSO approaches and competitive metaheuristic methods according to selected features. When Table 26 is examined, it is seen that the SMA method chooses the least feature in 5 out of 10 data sets. In addition, it was seen that CTSO-9, which obtained the highest accuracy value in the majority of data sets, obtained the highest results by choosing an average number of features compared to other methods.
| Australian | Ionosphere | Spectheart | Sonar | Wine | Heart | Thyroid | Tic-tac-toe | Vehicle | Krvskp | |
|---|---|---|---|---|---|---|---|---|---|---|
| CTSO-1 | 5.7 | 16.6 | 21.1 | 29.6 | 6 | 5.7 | 10.5 | 5.7 | 9.4 | 19.6 |
| CTSO-2 | 5.9 | 15.8 | 22.5 | 29.9 | 6.6 | 5.8 | 10 | 5.3 | 9.5 | 19.4 |
| CTSO-3 | 6.5 | 14.4 | 20.2 | 30.3 | 6.8 | 5 | 9.9 | 5.5 | 8.1 | 18.6 |
| CTSO-4 | 6 | 16.5 | 21.3 | 28.9 | 6.1 | 5.2 | 10.2 | 6 | 9.2 | 19.3 |
| CTSO-5 | 5.6 | 17 | 21.8 | 29.1 | 6.5 | 6.7 | 9.6 | 5.6 | 8.7 | 19.5 |
| CTSO-6 | 6.1 | 15.8 | 21.2 | 29.9 | 5.6 | 5.8 | 9.9 | 5.5 | 8.7 | 20 |
| CTSO-7 | 5.8 | 15.4 | 20.2 | 32.2 | 6.1 | 5.6 | 10 | 6 | 9 | 19.5 |
| CTSO-8 | 6.1 | 15.5 | 21.4 | 28.6 | 6.1 | 6.1 | 10.5 | 6 | 8.6 | 18.5 |
| CTSO-9 | 6 | 16.4 | 21.6 | 29.4 | 6.2 | 5.7 | 10.3 | 5.5 | 9 | 19.2 |
| CTSO-10 | 6.1 | 15.6 | 20.1 | 28.4 | 5.6 | 5.4 | 10.4 | 5.6 | 8.2 | 19.2 |
| TSO | 6.9 | 16.2 | 19.7 | 29.5 | 5.6 | 5.5 | 9.4 | 5.7 | 9.4 | 19.2 |
| AO | 5.3 | 16.4 | 21 | 30.1 | 5.9 | 5.8 | 10.9 | 5.4 | 9.3 | 19.1 |
| SMA | 1.1 | 7.3 | 1 | 29.7 | 5.7 | 3.5 | 7.4 | 6.7 | 9.3 | 20.3 |
| WOA | 2.6 | 8.3 | 11.9 | 22.4 | 5.1 | 5.6 | 7.4 | 6 | 7.5 | 20.9 |
Conclusion
TSO is a recently developed physics-based method that draws inspiration from the transient behavior of switched electrical circuits with storage components like inductance and capacitance. Our motivation was that this method is very new, tends to be stuck with local optimal solutions, has difficulties maintaining the balance between exploration and exploitation, and is not working to improve the performance of TSO. In this article, a number of chaotic maps have been incorporated in order to customize the TSO settings. By using chaotic maps with ergodic, irregular, and stochastic features in chaotic map TSO, it is aimed at avoiding local solutions more easily compared to the TSO method. In this way, the balance between exploration and exploitation has been achieved, and global convergence has increased. Ten distinct chaotic maps have been studied on twenty-nine different benchmark test functions, five different real-world engineering problems, and 10 different UCI standard datasets for feature selection. The findings demonstrated that the use of chaotic maps is capable of greatly enhancing TSO’s overall performance in a general sense. The approach that employs the Gauss and sinusoidal maps for supplying the values of parameter c1 has been determined to be the best chaotic TSO after being put through a series of comparisons with other chaotic TSOs. Gaussian and sinusoidal maps create a better balance between exploration and exploitation, which prevents the algorithm from being stuck in a local optimal state while it is in the process of optimizing its parameters. This is the reason for the enhanced performance. The results of the simulation demonstrated that Gaussian and Sinusoidal maps performed better than the standard TSO for the majority of the benchmark functions, that Sinusoidal maps performed better than the standard TSO for the majority of the real-world engineering problems, and that CTSOs generally suggested in the feature selection performed better than the standard TSO overall. According to the findings of the statistical analysis, customized algorithms clearly improve both the dependability of the global optimality and the quality of the outcomes.
Due to the fact that chaotic TSOs are relatively new, one potentially fruitful direction for future study would be to investigate how these algorithms perform in a parallel or distributed setting. The proposed CTSO method can also be applied promisingly in many different fields. Among them, many different fields such as machine learning, artificial intelligence, image processing, different real-world engineering problems, data mining, and big data are suitable for the application of algorithms. Like other proposed metaheuristic optimization methods, CTSO cannot guarantee that its solution will always equal the global optimum, due to its stochastic nature.
Appendix 1: speed reducer problem
Minimize:
Subject to:
with bounds:
Appendix 2: tension compression spring design problem
Minimize:
Subject to:
with bounds:
Appendix 3: welded beam design problem
Minimize:
Subject to:
where;
with bounds:
Appendix 4: pressure vessel problem
Minimize:
Subject to:
with bounds:
Appendix 5: three bar truss design problem
Minimize:
Subject to:
where
with bounds: