The 12th International Conference on Robot Intelligence Technology and Applications (RiTA 2024) was held at Ulsan National Institute of Science & Technology (UNIST), Ulsan, Korea, from December 4th to 7th, 2024. This Conference is organized by the Robot Intelligence Technology and Applications (RiTA) Association, a non-profit organization established to foster community solidarity among roboticists.
 As with previous RiTA meetings, PeerJ Computer Science will publish a Conference Collection in association with RiTA 2024. All presenters and attendees are eligible to submit full research articles relevant to the scope of the conference series to the Conference Collection. It will serve as a means of highlighting state-of-the-art results and novel contributions from researchers across the diverse fields of robotics.
As with previous RiTA meetings, PeerJ Computer Science will publish a Conference Collection in association with RiTA 2024. All presenters and attendees are eligible to submit full research articles relevant to the scope of the conference series to the Conference Collection. It will serve as a means of highlighting state-of-the-art results and novel contributions from researchers across the diverse fields of robotics.
Wilfried Yves Hamilton Adoni Researcher at Center for Advanced Systems Understanding (CASUS-HZDR) and the Helmholtz Institute Freiberg for Resource Technology (HIF-HZDR) of Helmholtz-Zentrum Dresden-Rossendorf (HZDR), Germany.
Can you tell us a bit about yourself and your research interests?
I received my B.S., M.E, and Ph.D in Computer Science and Applied Mathematics from Hassan II University of Casablanca, Morocco. I served as Assistant/Associate Professor of Computer Science at the International University of Casablanca and the CentraleSupelec School of Casablanca, and Lecturer of Computer Science at Hassan II University of Casablanca and in several universities in Africa. I also serve as Vice-President of Ivorian Society of Operation Research. My current research interests include Unmanned Aerial Vehicle, Swarm UAV, Robotics, Autonomous UAVs, Big Data, Internet of Things, Internet of Drones, Artificial Intelligence, Multi-Agent System and High-Performance Computing. I have been nominated Best African Male Geo-spatial Analyst/Robotic Automation Specialist in Germany at AFRONEWS Awards 2023. I joined the elite group of young Big Data Specialists with IBM BigInsights V2.1 in 2015.
What first interested you in this field of research?
What interests me most about autonomous robotics, and autonomous swarms in particular, is the complexity of interaction between robots. Given the dynamism of the environment and the high mobility of robots, several factors need to be considered. These involve communication, collaboration, cooperation, consensus control, fault-tolerance and many other factors that are difficult to formalize and implement in reality.
Can you briefly explain the research you presented at RiTA 2024?
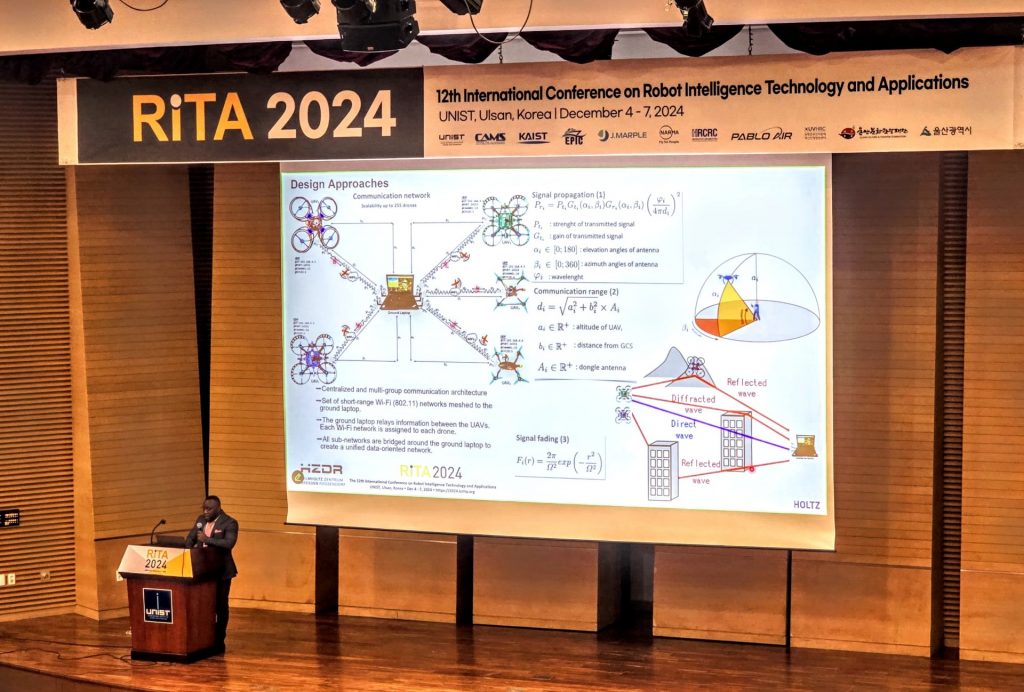
We proposed a hybrid communication architecture for point-to-point UAV (uncrewed aerial vehicle) swarm. The proposed infrastructure is cost-effective and enables to connect multiple UAVs to the ground control laptop through a bridged network using dual-bands USB 3.0 Wi-Fi adapters, and UAV-mounted wireless access points that operate on the IEEE 802.11bgn standard with 2.4GHz radio frequency. Real-world deployment tests carried out on quadrotors demonstrate that the communication infrastructure is reliable and scalable. It’s easy to add new UAVs without disrupting wireless network stability. Experimental results in an outdoor environment reveal an average throughput of 38 Mbps with a signal strength of -58 dBm and a signal-to-noise ratio of -98 dBm caused by wind, noise, rain and weather conditions. While it’s true that network stability is impacted by the dynamism of the environment and by interference, maintaining an optimum communication distance between the UAVs and the control station attenuates these inconsistencies. This work lays a solid baseline for low-budget swarming missions that involve the deployment of a flying ad-hoc network.
How will you continue to build on this research?
My greatest dream is to realize a fully autonomous multi-UAV system with high decision-making capability without human interaction. I see my research as a stepping stone to many types of autonomous swarms. My next goal is to propose a flexible, scalable communication architecture that allows the integration of various types of UAVs or robots for complex missions over large areas. Lots of challenges, but really exciting.